昨夜、事務所(松竹芸能)のネタ見せが角座であった。なんと、無線ルーターにロボットが接続できず、ネタを披露できないというロボットをネガに使い始めて初めての大失態を犯した。多分で、伝説になると思う。
その原因は、先月まで2年間使っていたWIFIのルーター(左)が、契約切れで、新しいものを契約せず、簡易なWIFIルーター(右)を使ったことだ。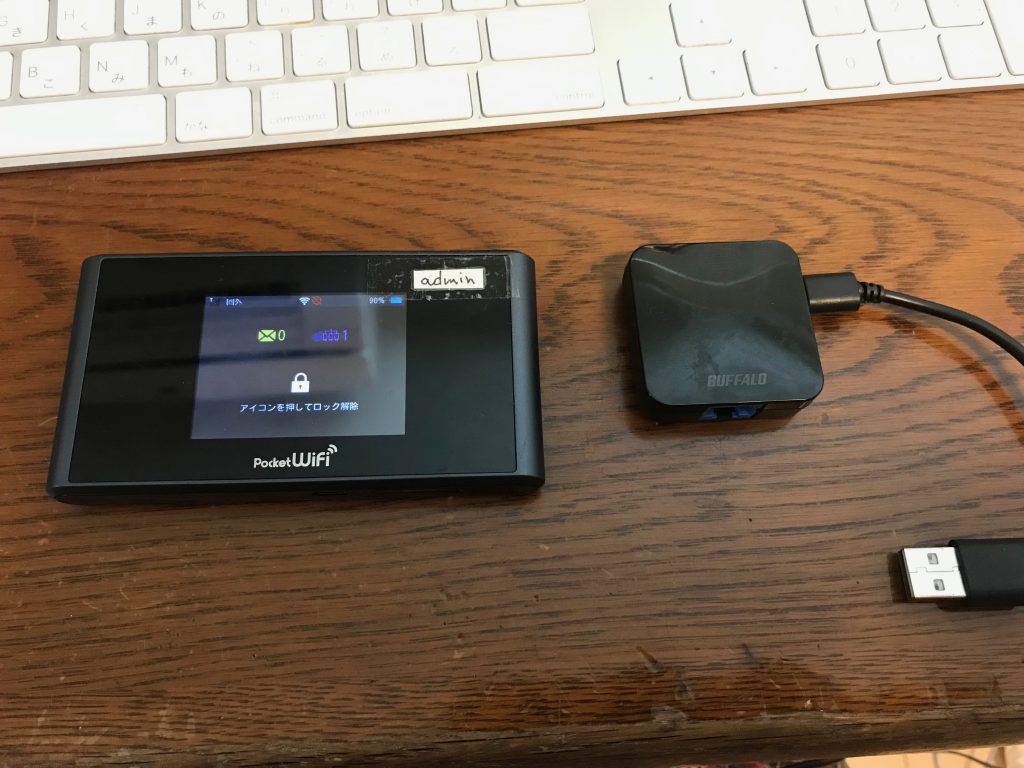
おそらく、簡易WIFIの電波が弱く、ちょっとの移動でロボットとの接続が切れてしまったためだと思う。外から、劇場にロボットをルーターと接続したまま持ち込むのだが、その途中に切れてしまったのだ。もっと十分なテストをすべきだった。
帰りながら、前のルーターは、ローカルにロボット同士をつなぐのには、別に契約が切れても大丈夫なのではないかと思いついた。こちらは、ローカルの配信に使う電波は十分に強いだろう。
契約切れでも、案の定、ローカルのロボットもパソコンもスマホも、相互接続を難なく繋げることができた。しかも、インターネットに接続したWIFIにつなぐことができることもわかった。自宅のWIFIモスマホのテザリングも繋ぐことができた。
しかも、こちらの方は電波が強く安定していることは間違いない。これでいける!!
(2019年3月7日:結局どちらも使いもにならないことがわかった。一応繋がるが、安定しない。繋がらない状況や接続の切断が発生する)