ディープラーニングだとかセンサーのことばっかりやっていたが、久しぶりにサーボを制御しようとした。
すると、コントロールソフトAicoをJAVAにしてから、まともにサーボの制御をしていなかったのに気づいた。そのために、制御プログラムのCOSM言語がJAVAのAicoでうまく動かないのに気づいた。いろいろ直した。
それに伴ってAicoもCosmも相当改訂した。
さしあたって、ロボットに片足立ちさせて見た。
どうってことでもない。一応、ちゃんと片足で立っている(左足の隙間!!、笑)。
この動きの間、センサーとサーボ角度を全て記録するようにモニターさせた。Cosmのプログラムで制御できる。モニターは、サーボの制御とは別スレッドで動かしている。それを実現するために、I2Cの1チャンネルはサーボだけに割り当てた。センサーは、全てSPIにぶら下げている。
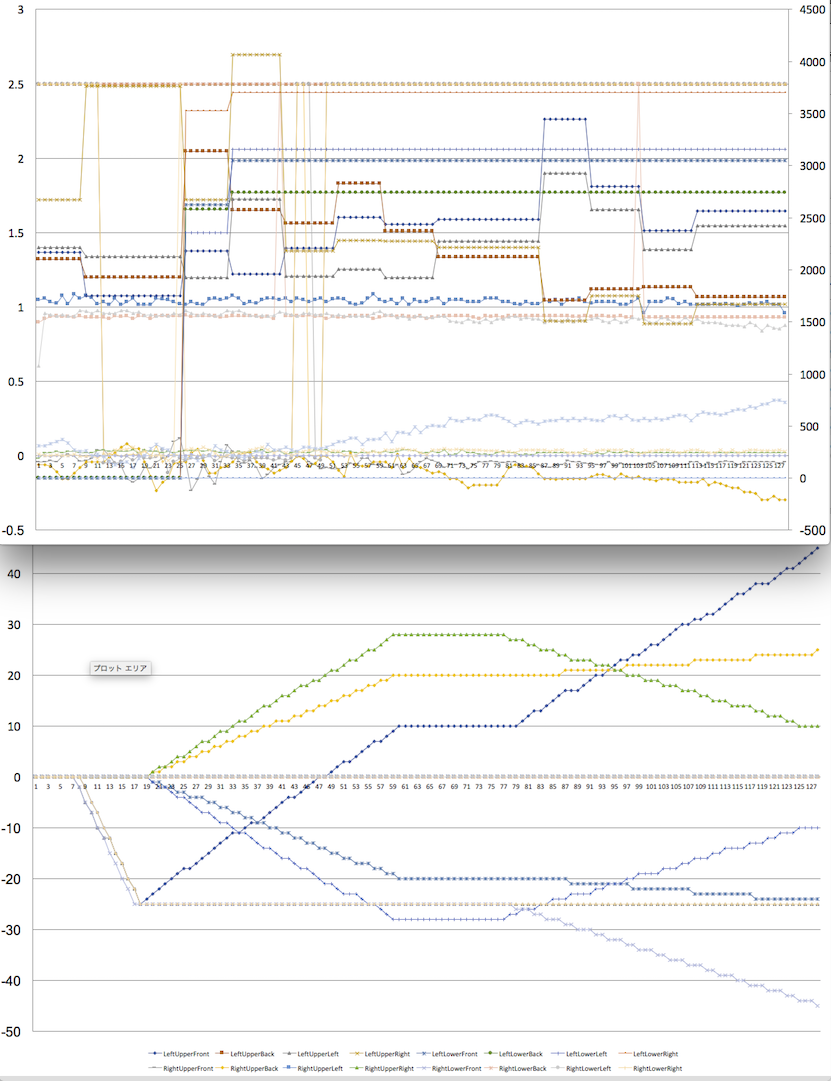
よくみると、正常に動いていないセンサーがある。おい、どうなっているの。
モニターの結果として、うまくいった場合の評点を与えるようにしている。それを通して、倒れてしまうようなまずい状態と、そうでない状態の識別、サーボのコントロールの仕方を強化学習、深層学習をさせようと思っているのに!!
それと、倒れても壊れないように、部屋に太めの鉄線を渡して、そこにぶら下がるようにした。
Cosmのプログラムは以下の通りだが、使っていないスピードやサーボ角度の定義も入っている。
#######################################
# ashiro1-9.cosm
# 2017年6月29日
# 再び1から作り直す
#######################################
%param foot_rest 25 # 足関節の緩和角度
%param null_angle 0 # ゼロ角度
%defspeed slow {
interval:10
steps:40
}
%defspeed normal {
interval:5
steps:40
}
%defspeed fast {
interval:3
steps:10
}
# 右へ
%defangles leg_stand {
RightUpperRight:$null_angle
RightUpperLeft:$null_angle
LeftUpperRight:$null_angle
LeftUpperLeft:$null_angle
}
%defangles foot_rest {
RightLowerRight:-$foot_rest
RightLowerLeft:-$foot_rest
LeftLowerRight:-$foot_rest
LeftLowerLeft:-$foot_rest
# 前後はさしあたってゼロにしておく
RightLowerFront:$null_angle
RightLowerBack:$null_angle
LeftLowerFront:$null_angle
LeftLowerBack:$null_angle
}
%defangles right_leg_phase_1 {
# これだけ完全休息から少し戻しておく
RightLowerRight:28
RightLowerLeft:-28
#
RightUpperRight:28
RightUpperLeft:-28
LeftUpperRight:20
LeftUpperLeft:-20
}
%defangles right_leg_phase_2 {
RightLowerRight:45
RightLowerLeft:-45
RightUpperRight:-5
RightUpperLeft:5
LeftUpperRight:23
LeftUpperLeft:-23
}
%defexec walk1 {
monitor:start
##
stand:all
speed:normal
# ゆっくり右に倒す
setAngle:right_leg_phase_1
delay:500
# ゆっくりと重心のない足を上げる
speed:slow
setAngle:right_leg_phase_2
##
monitor:stop
# この行動に評価を与える
rating:set
}
#以上は全て定義
#以下が、定義以外の実行コマンド
%exec walk1 1
月別: 2017年6月
Aicoの使い方(備忘録)
色々回り道をしていると、記録していないことは忘れてしまう。足郎のコントロールシステムであるAicoの基本的な使い方を忘れないように記録しておこう。現時点のバージョン(ver.3)のものである。使ってない人には、訳がわからないと思うが、備忘録なので無視願います。
1。起動
java -jar Aico.jar
2。起動オプション
(1)ハイフンなしで 二つの数字を空白を挟んで並べると、サーボ番号とその角度とみなされ、即実行される。
(2)-com の後に XXXX.cosmというファイルを指定すると、そのファイルは、制御言語cosmで書かれているとみなされて、記載されているプログラムを即実行する
(3)-stand | -relax | -rest のいずれかの後に、サーボグループを指定すると、それらのグループのサーボを起立:緩和:休息の状態にする。グループとしては、all, left, right, leftUpper, leftLower, rightUpper, rightLower が、指定できる。
(4)-help は使い方の表示
3。コマンドモード
起動オプションを何も指定しない場合、および、起動オプションで指定した動作を終了すると自動的にコマンド解釈モードに入る。
aico >>
というプロンプトが表示され、コマンドを受け付ける。
(1)quit, exit, bye のいずれかが入力されるとAicoを終了する
(2)readの後にcosmのプログラムファイル名(パス)を記載するとそれを読み込む。実行はしない。指定されたプログラムがないと、src/resourcesのフォルダいかにあるかどうかもチェックする。
(3)exec コマンド(単に'e' 一文字でもいい)で、読み込まれたプログラムを実行する。その際、exec allで全てを実行し、 exec xxx:yyy&sss:ttt ・・・で、読み込まれたプログラムの個々のコマンドを実行する。引数部分は、%defexec 内に記載する個別コマンドのフォーマットで記載し、複数のコマンドを実行する場合は'&'でつなげる
(4)chparam(cpでも良い)で、読み込まれたプログラムのパラメータの値を変更できる。
chparam expara1:30&expara2:35 のような感じで指定する。expara1,expara2はパラメータ名の例。
(5)chspeed (csでも良い)で、読み込まれたプログラムの実行速度の定義を変更できる。chspeed interval:2&steps:30 のような感じで指定する。必ず、intervalかsteps、あるいは両方指定される必要がある。
(6)angle (aのみでも良い)個別サーボの角度を与える。angle 4 30 のような感じで指定する。この場合、サーボ番号4を角度30に設定する。
(7)inertia 左右、または、前後に関わるサーボだけを弛緩させる inertia rightleft,30 左右の動きに関わるサーボ群の30度弛緩、rightleft の代わりにfrontbackで、前後のサーボの弛緩。
(8)起動オプション(3)と同じことができる。ただし、'-'はいらない。
(9)各種テストの実行。pres:圧力センサーのテスト、accel:加速度センサーのテスト、memtest:メモリーのテスト、monitest:モニターテスト
左右の足のサーボをスレッド化したかった
左右の足のサーボを、それぞれ別スレッドで動かそうと思った。
RaspberryPIはデフォルトでは1個のI2Cチャンネルだが、簡単に二つのチャンネルを有効化できる。/boot/config.txt に、
dtparam=i2c_vc=on
の一行を加え、/boot/cmdline.txtni に、
dwc_otg.lpm_enable=0 console=serial0,115200 console=tty1 root=PARTUUID=27ca714e-02 rootfstype=ext4 elevator=deadline fsck.repair=yes bcm2708.vc_i2c_override=1 rootwait quiet splash plymouth.ignore-serial-consoles
のように、
bcm2708.vc_i2c_override=1
を加えて、リブートする。
そうすると、
pi@ashiro:~ $ ls -l /dev/i2c-*
crw-rw---- 1 root i2c 89, 0 6月 27 17:17 /dev/i2c-0
crw-rw---- 1 root i2c 89, 1 6月 27 17:17 /dev/i2c-1
の二つのデバイスが現れる。すると、ID_SDとID_SCに割り当てられている27,28番ピンをSDA0とSCL0ピンとして使える。0チャンネルが新しく加わる。(プルアップする必要がある)
$ i2cdetect -y 0
とすれば、0チャンネルにぶら下がっているデバイスが認識できる。
この二つのデバイスに、左足と右足のサーボ群をそれぞれスレッドで動かすようにぶら下げたいのだが、足郎1の上版ボードにPCA9685のボードを乗せる余裕がない。諦めた。
足郎2では、最初から乗せるような設計にしたいと思っている。
(http://robo.genv.sophia.ac.jp/wp_robot/?p=1844 参照)
記憶のフォーマット
センサーとサーボの状態を脳に記憶させるのだが、フフォーマットを少し考えた。
記憶から、自己学習させる。
一連のサーボの動態、結果としてのセンサーデータから、その動きが、いい結果をもたらすのか、否か、その評価ができるようにする。
センサーが、ひどい動きをすれば、それは忌むべき状態だ。その、嫌な感覚をロボットに教え込む。
ほんとうは立つところから教えたい。
脳の状態表示のためのLedをつけた
人工知能を組み込んだ小脳の学習データの記録や、成功、失敗の判断状況がすぐわかるようにするために、Ledを取り付けた。
300オームの抵抗をかましたが、大きすぎたかもしれない。Ledなんて、切れるほどに光らせたらいいと思っているのに以外と暗くなってしまった。
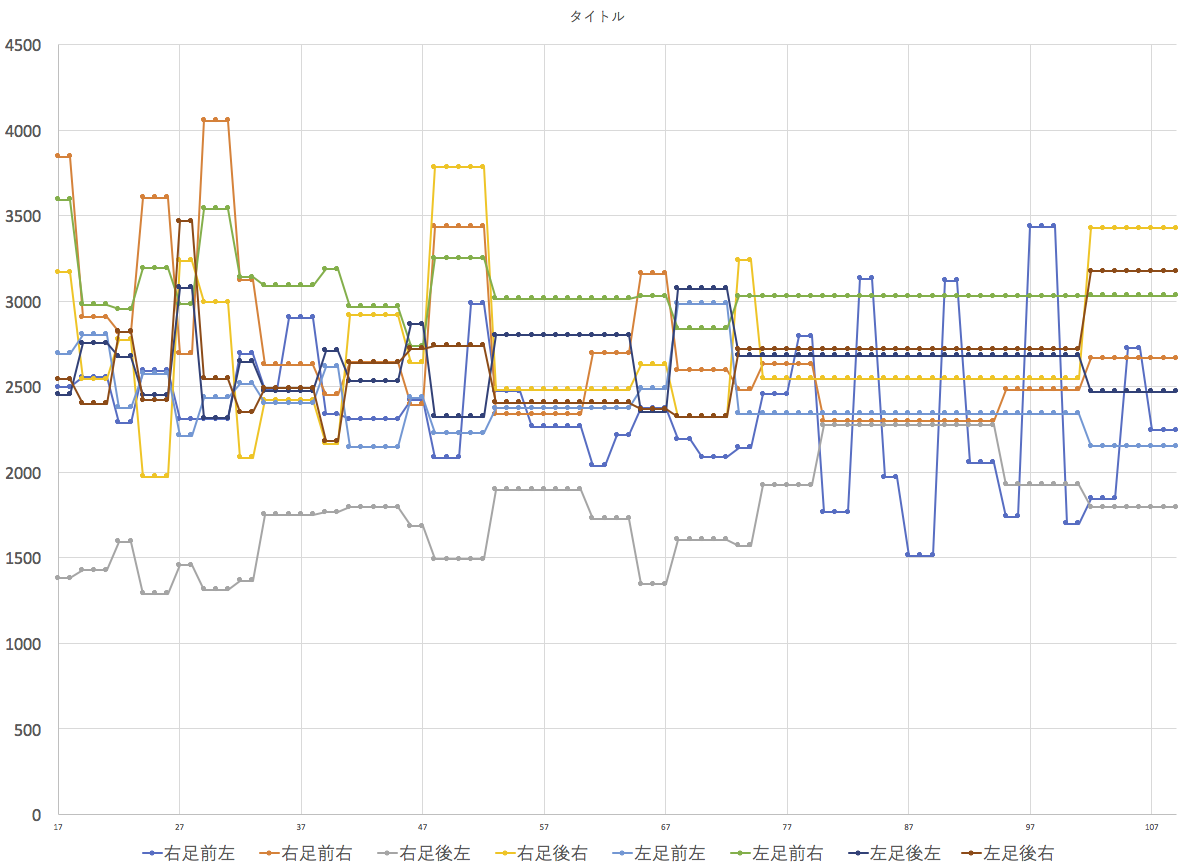
ロボット上で、圧力センサー8個と加速度センサー5個を制御する
全てのセンサー(足裏に片足4個両足8個の圧力センサー、上版とスネ2個及び足2個の計5個の加速度センサー)をロボットに装着、2つのSpiチャンネルをフル稼働してデータが取れるようになった。
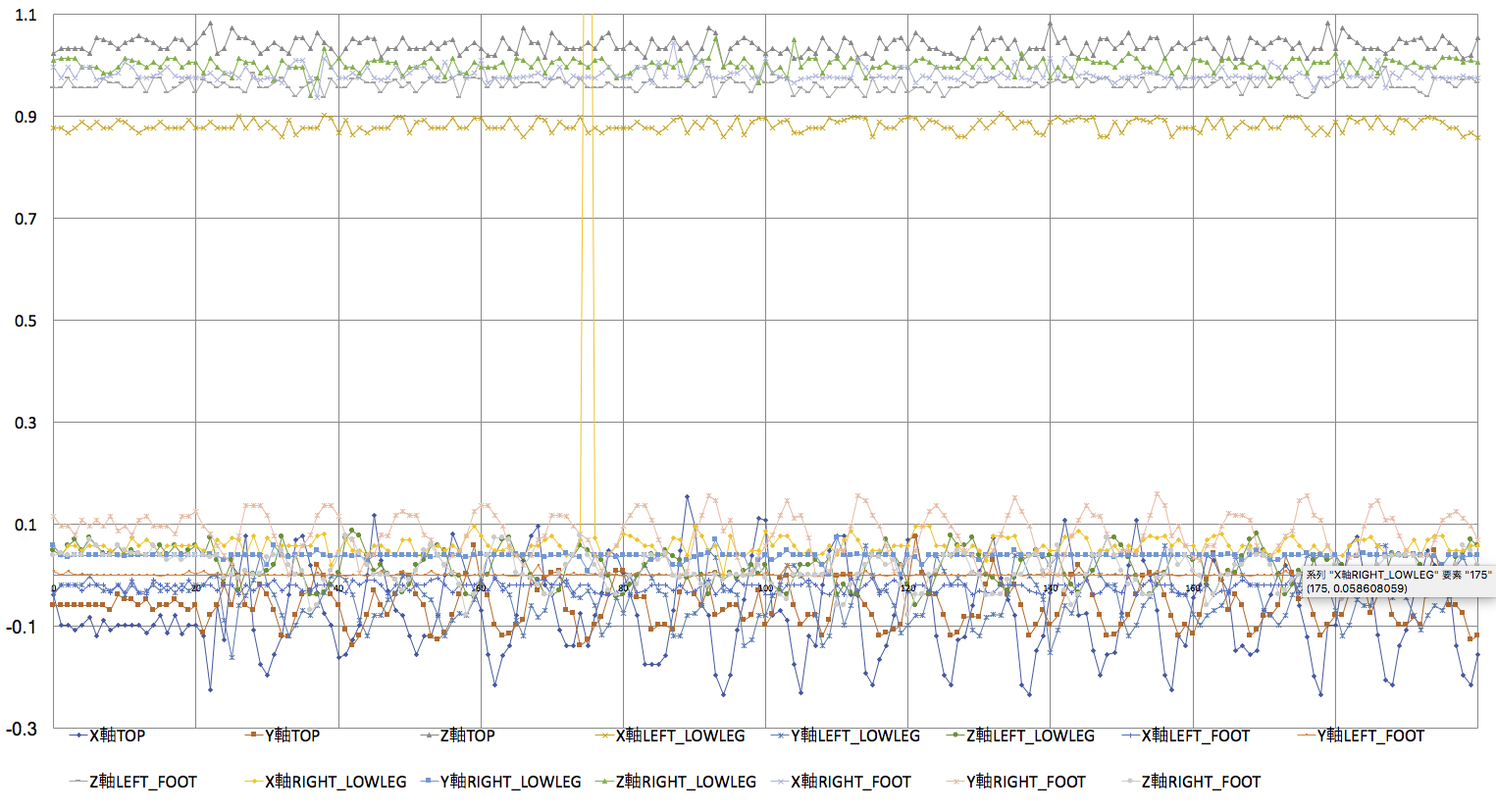 加速度センサの膝下に設置した2個は、X軸が縦になっているので1gのあたりでうろついている。異常値が1つあるが、電源がショートしたか飛んだのではないかと思っている。
加速度センサの膝下に設置した2個は、X軸が縦になっているので1gのあたりでうろついている。異常値が1つあるが、電源がショートしたか飛んだのではないかと思っている。
圧力センサーの不器用な動きがきになるが、ADコンバータの仕様ではないかと思っている。
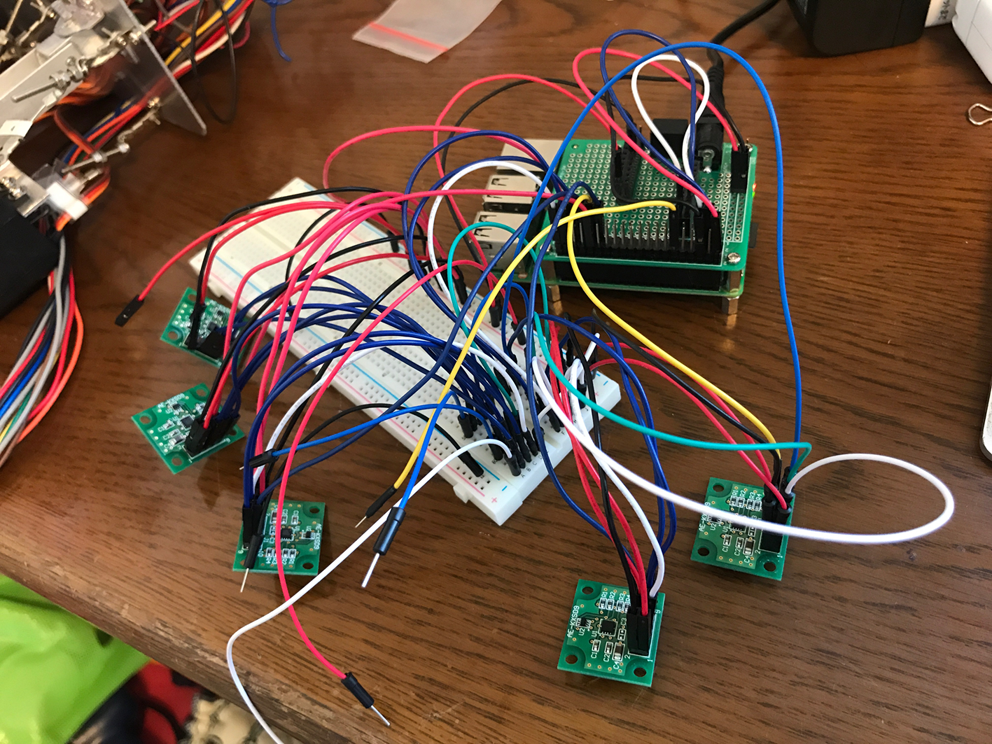
ロボットは、配線のお化けのようになった。
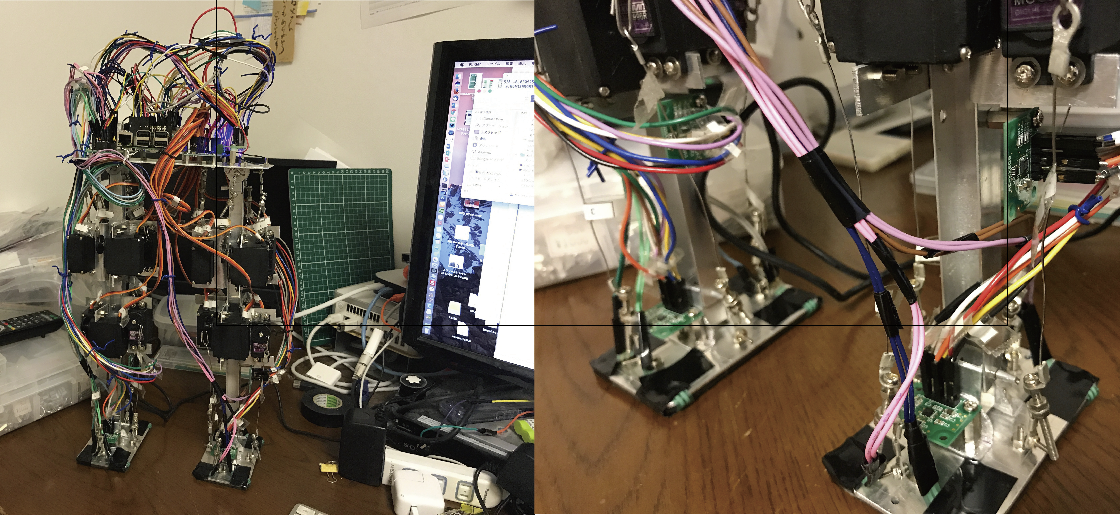 次は、これらのセンサーとサーボモーター群をロボットの脳である、ニューラルネットワークシステムにつなげる。
次は、これらのセンサーとサーボモーター群をロボットの脳である、ニューラルネットワークシステムにつなげる。
研究会の刷新
この研究会ページを大幅に更新した。
何よりも研究会の名前を上智大学ロボット研究会から単にiBot研究会に変更した。
3年前(2014年7月5日)にこのサイトを開いたときは、本当に、上智大学を代表するような研究会にしたいと思った。大学の中で、学生も含めたくさんのロボットを研究したいと思う人たちと一緒に研究を深めたいと思った。大学の中で仲間も募った。呼びかけた。ほとんど反応がなかった。
結局、私自身が、誰が見ているかいないかに関わらず、自己確認のために、あるいは忘却防止のために書き続けるサイトになった。自分としては、すごいことを書き続けている気はするのだが、さっぱり反応はない。しかし、これは階段を自分で作りながら登る作業なので、その階段を確認するためのページとしては十分すぎるほど役立っている。
私から見れば、過去の記事は古い記事で、ほとんど新鮮味がないので、新しい状況に応じた、細かい訂正もしていない。それを理解して過去の記事は見て欲しい。
人もいないしお金もないので、ちゃちなことをやっているように見えるかもしれないが、自分としては、誰もやったことのない場所を歩いている気持ちだ。
RaspberryPI3 用のSpiライブラリ
この間使っている、Cで書かれたRaspberrypi3用のSpiライブラリ、および、そのライブラリを呼び出して、加速度センサーKXSD9を制御するJAVAプログラムのサンプルをGithubに公開している。
https://github.com/toyowa/libspi
RaspberryPIのSpiで5個の加速度センサーKXSD9を動かした
ただし、Spi0チャンネルのスレーブデバイス1番に2個ぶら下げて、Spi1チャンネルのスレーブデバイス0番に3個ぶら下げた。これで、Spi0チャンネルのスレーブデバイス0番に圧力センサ用のADコンバータをぶら下げた時に全部正常に動けば問題ないが、これはまだ試していない。
理想は、SPI1に5個全部ぶら下げることだが、それはできなかった(一つ前の記事に書いた)。
このために、JAVAから呼び出すCのspiライブラリ
libspi.so.2
は、複数のSPIチャンネル、デバイスを呼び出すことができるように改訂した。
今は、用事があるので、ここまでだ。帰ってから、圧力センサのADコンバータの追加をしてみよう。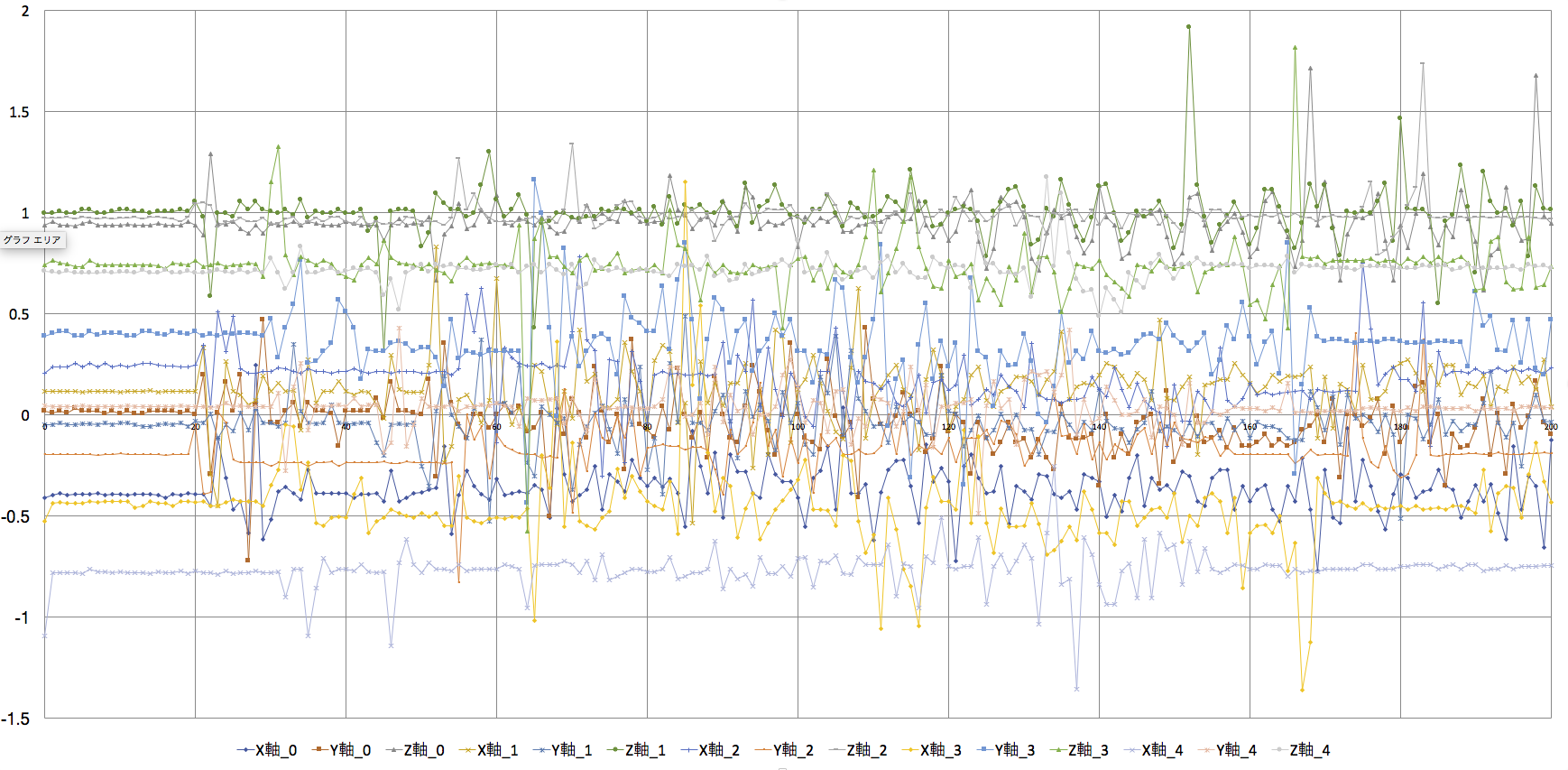
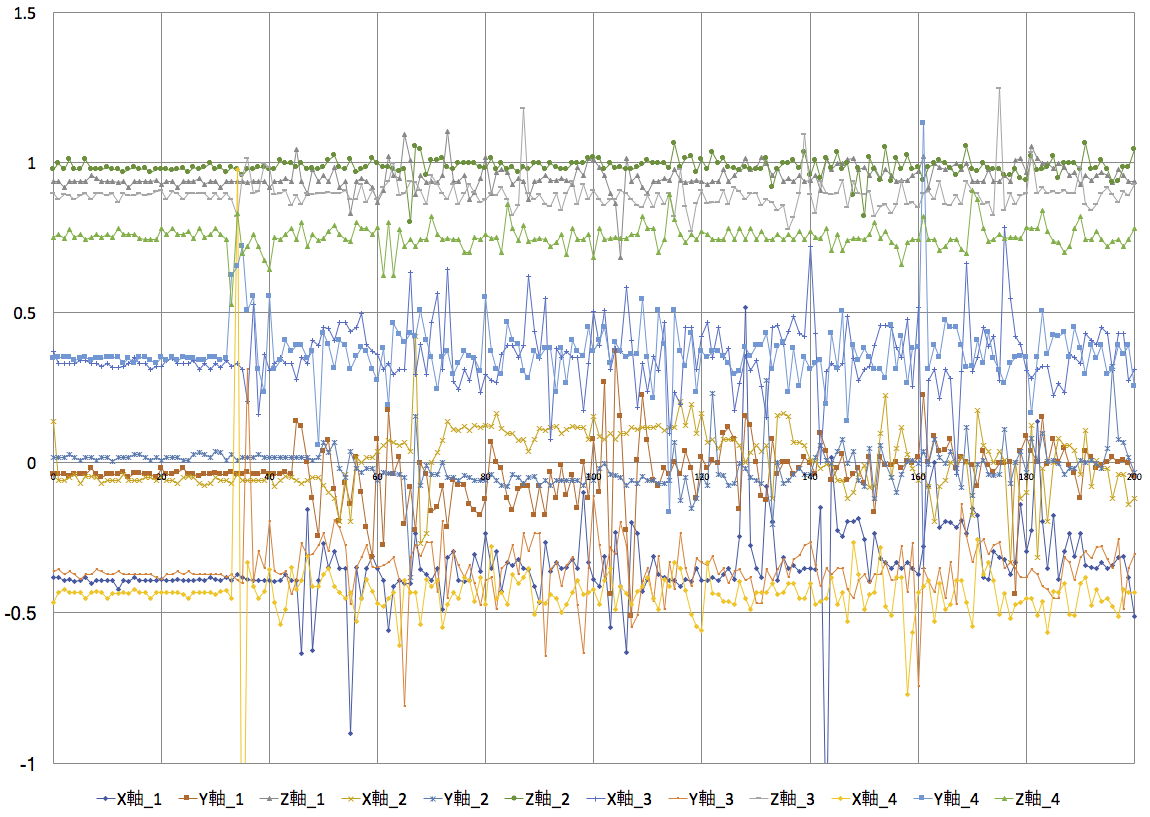
Spiにぶら下げた5個めのセンサーが動かない
RaspberryPIのSpiチャンネルの1、スレーブデバイス0にGpioを変えて複数のぶら下げる試み(チャンネル0は圧力センサーようにしている)。4個めまでは動くのだが5個めが動かないという不思議な現象に行き詰まっている。
(出力データ図、手で少し揺らしていた)
 この前作成した、Cのライブラリ(libspi.so)も、まあ、正常に動いてJAVAから呼び出せている。Gpioの電流を使いすぎかとも思ったが、一つのセンサーが使う電流は数百μAがせいぜいで、LEDなどとは違う、わずかだ。(Gpio一個の限度が16mA、トータルで50mAくらいという話だ)
この前作成した、Cのライブラリ(libspi.so)も、まあ、正常に動いてJAVAから呼び出せている。Gpioの電流を使いすぎかとも思ったが、一つのセンサーが使う電流は数百μAがせいぜいで、LEDなどとは違う、わずかだ。(Gpio一個の限度が16mA、トータルで50mAくらいという話だ)
なんとかフェイクでも5個めを動かしたい。