逆振り子ロボットに、いろいろな転倒をさせてみた。あるいは、転倒の回避を試みた。数え切れないほどやったが、その一部を書いておきたい。
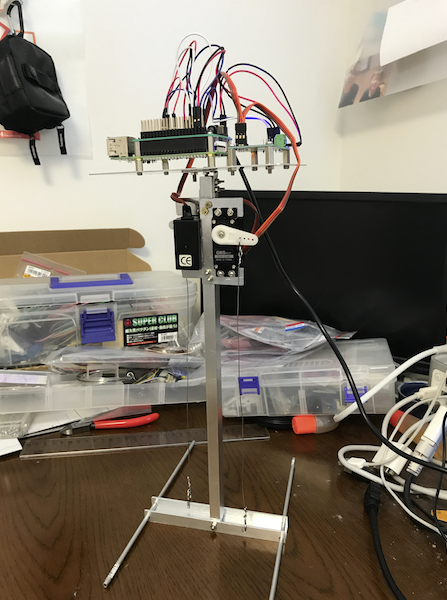
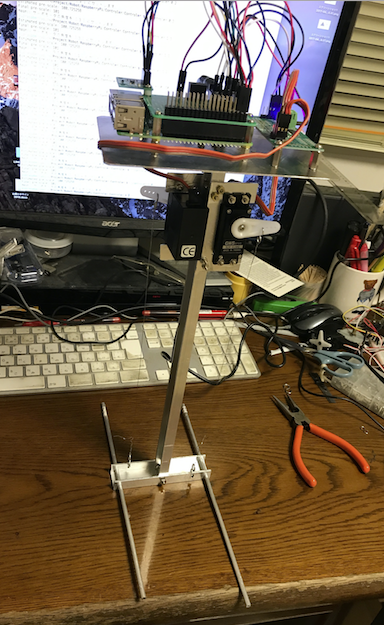
逆振り子ロボットアイコメ01の雄姿(笑)は左のようなものだ。写真では、左右方向にだけ倒れるように作ってある。足先に向けて、2台のサーボのワイヤーが張ってあるので、これを張ったり緩めたりして転倒させたり、転倒を制御させたりしている。
写真は、サーボ角度をほぼニュートラルにちかい位置にして直立させている。
サーボを緩めて、自然転倒させた時の3軸加速度センサーが捉えるデータを示しておこう。
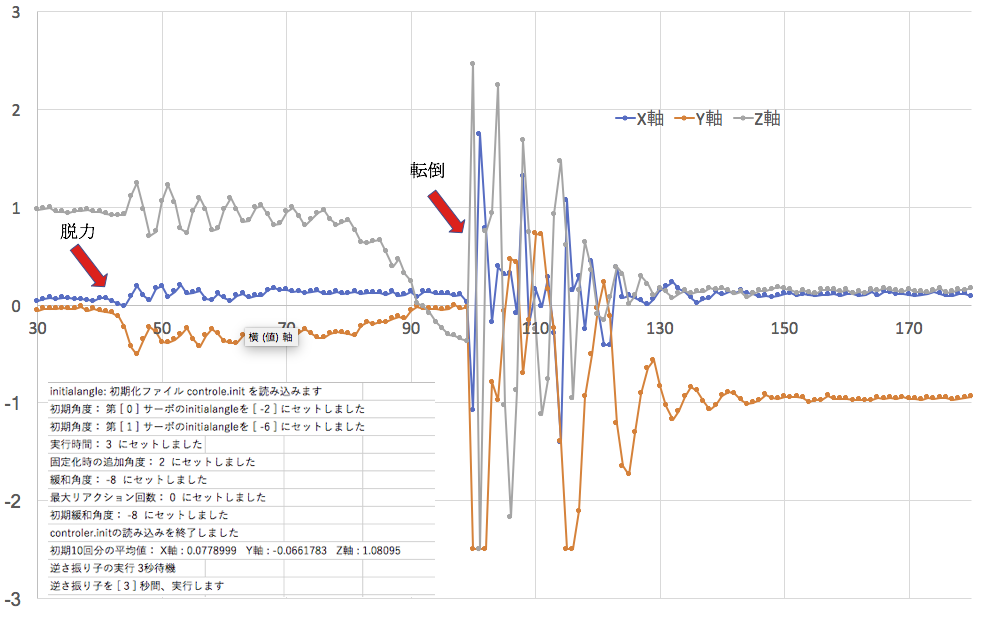
横軸の目盛りは10ミリ秒単位で、センサーから撮ってきたデータの番号である。縦軸は上から順に、Z、X、Y軸の加速度センサーのデータである。
Z軸は、垂直方向であるが、サーボの脱力によって上下の微妙な揺れが生じるが、倒れるに従ってそれは減衰している。青がX軸だが、倒れないようになっている方向のため、微妙な揺れだけにとどまっている。一番下のY軸のデータが、倒れる方向のものだ。ただ、ゼロから、一挙に(回転方向である負の方向に)上昇するが、倒れるに従ってまたゼロに戻っていっている。回転に従ってこの方向の動きがなくなるからである。倒れた瞬間に、加速度センサーはパニックになる。
このパニック状態は、ロボットが一番不快な状態になっていると考えれば良い。これは、のちに、ロボットに運動を学習させるときに、不快感のシグナルとして使いたいと思っている。
衝撃が治ると、Y軸が垂直になっているので、1g(gは重力加速度)になって、他はほぼゼロになっている。わずかの傾きがあるくらいだ。
次に、転倒をロボット自身んが検知した瞬間(0.1gの変化)、転倒する反対側のサーボを、角度を縮める形で固定した。すなわち、逆方向に揺り戻そうと動かした時の反応は、次のようになる。
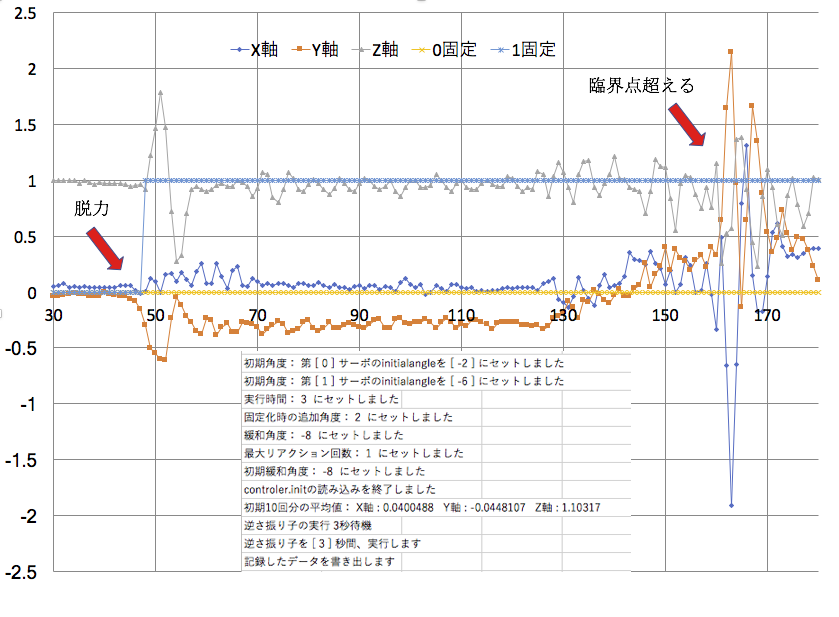 まず、Z軸が、脱力と片側固定化の、一瞬の大きな揺れの後、1gを維持している。先の完全転倒の場合と比べて、水平状態がほぼ維持されていることを意味している。それでもわずかに左に傾いていることは、Y軸の動きによって知ることができる。それが一見安定しているようだが、脱力から0.8秒後に反対側に向かっての回転が発生して、矢印のところで臨界点を超える。この臨界点を超えるというのは、データからの判断ではなく、ロボットを見ていた私が、これは、ほっておけば倒れると判断したところで、私がその時点でロボットを支えた。
まず、Z軸が、脱力と片側固定化の、一瞬の大きな揺れの後、1gを維持している。先の完全転倒の場合と比べて、水平状態がほぼ維持されていることを意味している。それでもわずかに左に傾いていることは、Y軸の動きによって知ることができる。それが一見安定しているようだが、脱力から0.8秒後に反対側に向かっての回転が発生して、矢印のところで臨界点を超える。この臨界点を超えるというのは、データからの判断ではなく、ロボットを見ていた私が、これは、ほっておけば倒れると判断したところで、私がその時点でロボットを支えた。
最初の転倒方向への完全転倒は避けれたのだが、逆のサーボが引き戻したことによって、逆側に倒れてしまう事態になったというわけである。
カテゴリー: ロボット作り
1関節ロボット上の加速度センサーデータ
(以下の記事の元になっているのは、この論文)
1関節ロボット、アイコメ0.1(外形はこちら)上におかれている3軸加速度センサーが転倒に対してどのように反応するかを調べてみた。
正直驚いた。ロボットに載せずに、机の上で動かしたりのシミュレーションはすでに行っていて、その結果も示しているが、その結果とは大きく違っている。
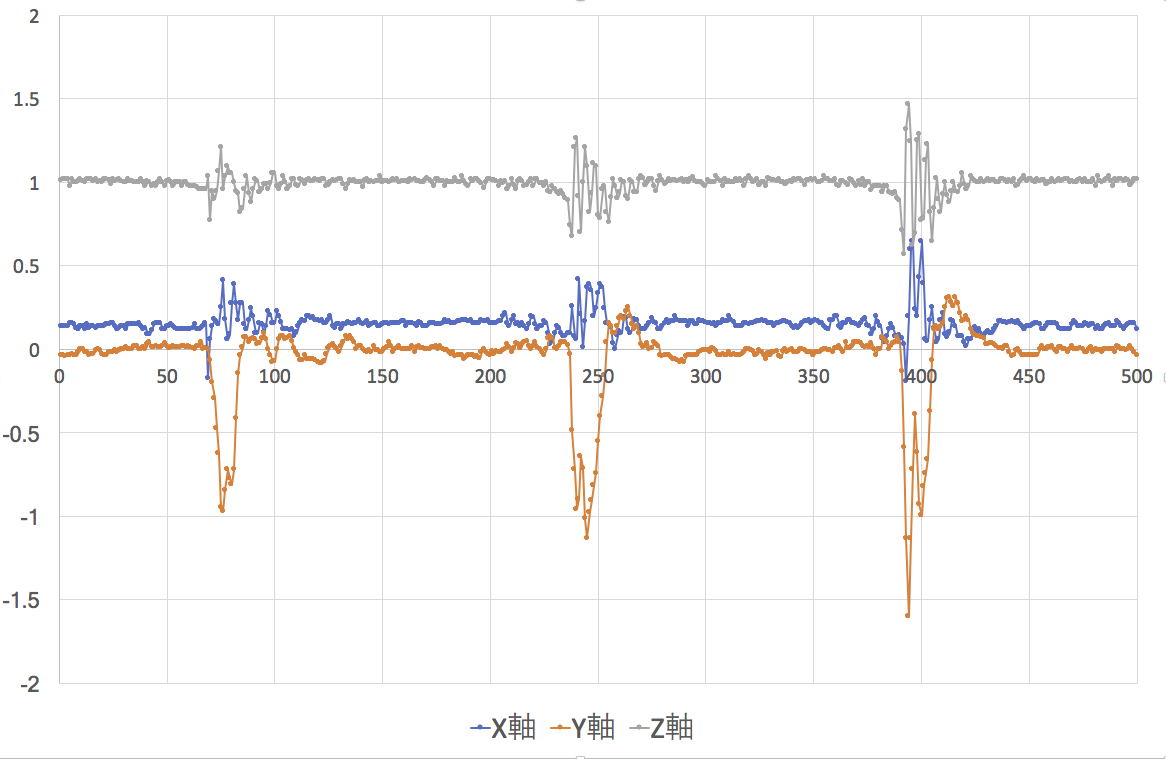 垂直に立てた状態から、手を離して、5度か10度自由に傾かせて、手で止めてまた垂直に戻すというのを3回やったデータである。止めたところは、およそ、ここで関節を固定させたらいいなと、私が判断した場所である。
垂直に立てた状態から、手を離して、5度か10度自由に傾かせて、手で止めてまた垂直に戻すというのを3回やったデータである。止めたところは、およそ、ここで関節を固定させたらいいなと、私が判断した場所である。
(1)重力の誤差が小さい。Z(縦)方向のg(重力加速度)は1で、他はゼロが理論的に予想されるところだ。ほぼ、そんな感じだ。Y軸は、私がほぼ水平(すなわち棒が垂直に立っている)と思われるように調整しているが、前後の軸(X軸)は、丁寧に調整していないのでわずかにずれている。
(2)一度の揺れを感度良く捉え、たくさんのデータを輩出している。前の結果と比べてもらえば一目瞭然だ。サーボによる調整のトリガを出す上で、とてもわかりやすい。
ここで、理論的に予測される、臨界角度を調べてみよう。アイコメ01は10センチの横棒の中央から33センチの高さ(コンピュータが置かれているアルミ板までの高さ使う)だから、その比は6.6である。この場合の臨界角βは、ラディアンで0.075869、角度で4.346973501度であることがわかっている(この論文参照)。
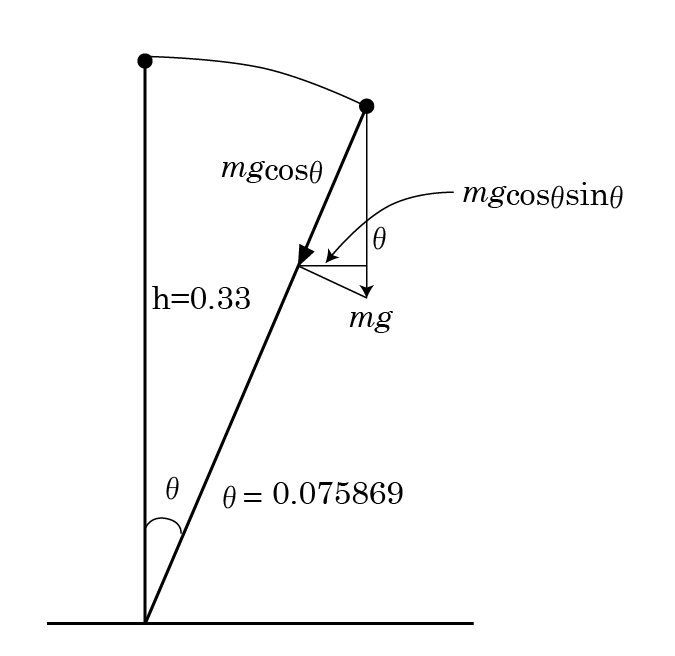
すると、左の図からわかるように、Y軸方向の加速度は、sinθcosθであるから、重力加速度のsinθcosθになったときが垂直からの角度がθになったときであることがわかる。このθに0.075869を入れると、上記の値は、0.001324162となる。つまり、Y軸方向の加速度が絶対値で、0.001324162ときである。
もし、この理論値が正しければ、極めて初期の段階で、関節の固定が必要となることを意味している。
サーボモータに、こんなに微妙なコントロールは不可能であるから、実際上は、センサーが倒れ始めているデータを出し始めた途端、関節を固定化するようにサーボの角度を与えることが必要になる。
1関節ロボットによる逆振り子理論の検証
(以下の記事の元になっているのは、この論文である)
早朝から、アルミの板と棒を切ったり穴開けたりしながら、この間議論してきた理論を実証すべく、自由な関節を1個だけ持ったロボットを作った。たくさんのボルトやナットを使ったが、一時期、電子工作に凝っていたので、その時のものでほとんど間に合わせた。
「冷蔵庫にあるものでラーメンを作った」という感じのロボットだ。
いや、「これはロボットではない」と言われればあえて否定しないが、自分では、私が自分で作った最初のロボットの筐体だと思っている。脳はあるが、まだ知恵は何も入っていない。あえて名前をつければ、AiComedian ver.0.1 である。アイコメと呼ぼうか。
 アルミの縦棒が机についているあたりに、アルミの横棒があり、それらをつないでいるのが横方向にだけ自由に回転する関節、ジョイントである。
アルミの縦棒が机についているあたりに、アルミの横棒があり、それらをつないでいるのが横方向にだけ自由に回転する関節、ジョイントである。
横棒には、前後に倒れないように4ミリのアルミ棒が左右に二本つけられている。だから、この縦棒は、左右にしか動かないのである。
ただし、今こうして立っているのは、上部に二つのサーボモータがついていて、下の横棒との間に0.3ミリのステンレス線が張ってあるからである。
さらにその上には、コンピュータ( RaspberryPi)と3軸加速度センサー、I2Cによるサーボコントローラを乗せたアルミの板がある。
サーボは、水平角度を0度として運用しているが、およそであって、今の状態は、手前のサーボ(1番)がサーボの角度で0度、向かいのサーボ(0番)がサーボの角度で+3度でほぼ釣り合った状態になっている。サーボの角度を下向きに変化させると、縦棒は勢いよく倒れる。
C++で加速度センサーとサーボをコントロールするクラスを、それぞれに作ってあるので、センサーの検出した傾きから、サーボをコントロールして、逆さ振り子の状態を実際に創り出したいと思っている。
ことの成否は、転倒開始時に、加速度センサーがどんなデータを送ってくるかにかかっている。
加速度センサーの精度
(以下の記事の元になっているのは、この論文)
ロボットの転倒に関する議論をしてきたが、逆振り子で転倒を回避する場合でも、自らの傾き、ないしは揺らぎを捉えることが不可欠である。ここでは、KXSD9-2050という750円のセンサーを使っているので、どこまで精度が出るのかがいたって不安である。
そこで、より詳細に調べてみた。
KXSD9-2050については、sensitivityを819counts/g (g: 重力加速度 = 9.80665 m / s2)に変更したことを除いて、初期設定を採用している。
10ミリ秒に一つのデータを取る計算で、500個のデータを取った。その間に、センサー(RaspberryPiに固定している)を6回だけ、数ミリずらせる速度をY軸方向に与えた。そのうちの50個目から200個目までのデータを図で表したものが以下の画像である。
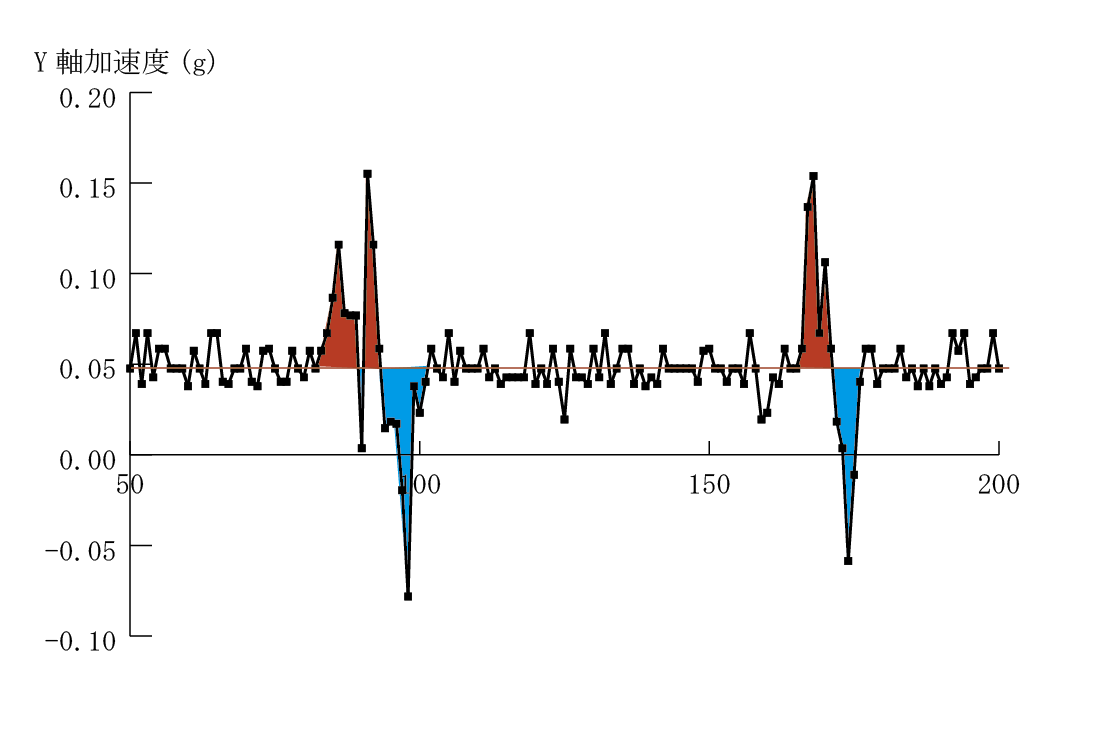 Y軸だけをみている。縦軸のgはY軸方向の重力加速度である。水平方向であるから0でなければならないが、0.05となっているのは、多少Y軸が傾いていることからくるのか、私の家が傾いているのか、机が傾いているのか、そんなところだろう。ホワイトノイズとして処理する。
Y軸だけをみている。縦軸のgはY軸方向の重力加速度である。水平方向であるから0でなければならないが、0.05となっているのは、多少Y軸が傾いていることからくるのか、私の家が傾いているのか、机が傾いているのか、そんなところだろう。ホワイトノイズとして処理する。
数ミリ動かしたことによる影響は、赤と青で色ぬりされた部分に現れている。赤から始まっているのは、Y軸のプラスの方向に加速度が与えられ、マイナスになっているのは、速度が低下して、ほぼ再び止まったことを表している。止まったということは、赤の面積と青の面積がほぼ等しいことを表す。
実際移動した距離は加速度がプラスから始まっているので、Y軸方向に移動してどこかで止まったということで、それまでのプラスの距離になる。
指で数ミリ動かしただけで、これだけのものがとらえられることは、この安物のセンサーも結構使える可能性があることを示している。
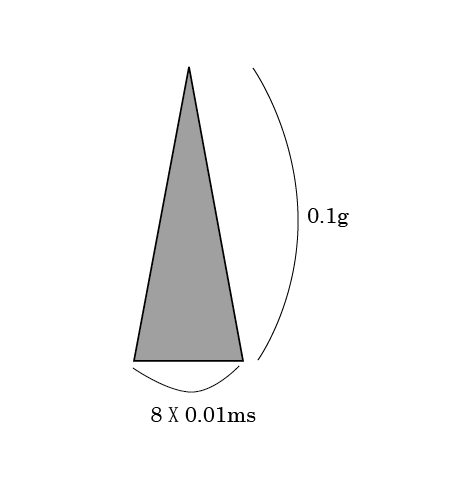 今、赤と青の部分が単純な三角形だったとしよう。横幅が8目盛、高さが0.1gくらいになる。この時、最高速度は、
今、赤と青の部分が単純な三角形だったとしよう。横幅が8目盛、高さが0.1gくらいになる。この時、最高速度は、
80(ms)X0.1(g)X(1/2)=0.08X0.1X0.5X9.80665=0.039226(m/s)
およそ1秒間に4センチ動くくらいの速度が最高速度だったということになる。
それから速度が0になるまで同じくらいの時間がかかったとしよう。簡単化のために、全て、三角形で捉えよう。(実際は曲線)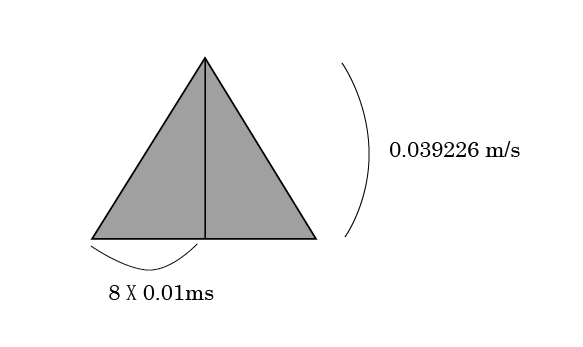
そうすると、移動した距離は、
0.08X2X0.039226/2=0.00313808(m)
すなわち、3.2ミリ移動したことになる。私が先に数ミリ動かしたと言ったが、ほぼその値に一致する。
ということは、この加速度センサーが捉えている加速度は、ノイズできなものはありながらも、なかなか、実態を反映しているということなのである。
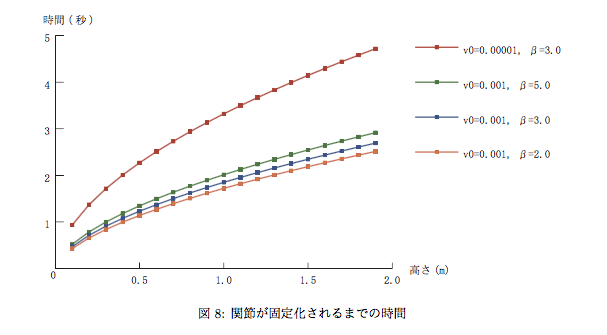
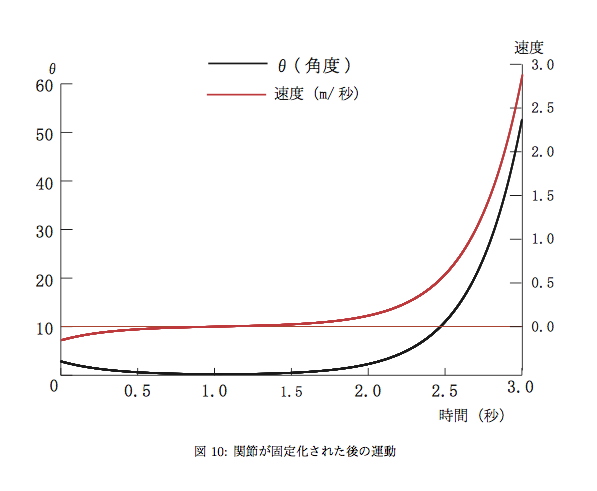
時間を入れたシミュレーション
ロボットの転倒とその回避に関わる分析で、これまでは明示的に時間が入らなかった。そこで、ロボットの転倒と回復に関する運動方程式を求めてシミュレーションしてみた。
結果の詳細は論文参照
人型ロボット同士の通信プロトコル
様々なヒューマノイドロボットが存在し、また、これからどんどん増えてくる状況の中で、異なった種類のヒューマノイドロボット同士が、コミュニケーションをとるプロトコルが必要だ。
(1)相手の存在を感知すること。携帯から判断するのは面倒だから、赤外線、電波などで感知する規格を整える。
(2)同じローカルネットワークに繋がっている場合には、必要に応じてブロードキャストやその受診をする。
(3)赤外線や、ブルートゥース、超音波、もロボット通信用に規格化される必要がある。
(4)情報交換の手続きの規格化。たとえば、お互いの種類(一位に割り振られたコード番号があれば良い)、名前、所属、基本的な機能、製造目的などが、必要な範囲で相互に交換できるようにする。
(5)現在立っている相互の位置。相互衝突回避の手続き。
(6)ロボット同士の専用言語機能。
など。
できれば、上記のことを、KHR-4HVとNAOの間で試みたいのだが、KHRのほうが、Linuxからロボットを動かす、シリアルボードの認識がうまくいかず立ち止まっている。