目的としては図のようにしたいわけである。(理想的なところはどこにあるかを記録のためにここに書いておく。)
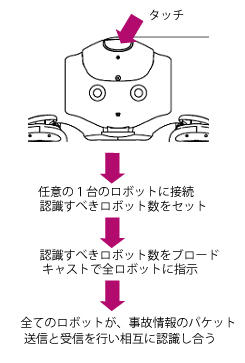 しかし、当面2台しか持っていないので、この図で言う認識すべきロボット数をブロードキャストで流すという部分を省略している。
しかし、当面2台しか持っていないので、この図で言う認識すべきロボット数をブロードキャストで流すという部分を省略している。
デフォルトで、2台のロボットを認識すようにして、それ以上の場合は、認識すべき台数だけは、頭にタッチする以前に、個々のロボットにセットしなくてはならなくしている。
また、今は、頭頂前部のタッチにしているが、いずれは、一旦タッチすると無効にして、再有効化のためにはブロードキャストで、またセットし直す必要があるようにしたい。