以下の記事についての詳細は論文参照
NAOは、ただ立っているとき、小さく体を揺らしている。これはALDEBALANの技術者が、より生きているように見せようとした工夫だろう。実際そう見える。ただこれが、NAO自身にとって必要なこととは思えない。問題は、なぜ体を揺らすことが生きているように見えるために必要なのかということだ。結局それは、人もまた、立っている時でも体を微妙に揺らせているからだ。人の場合は、体を揺らせることによって直立状態を維持できる、という必要においてそうなのだ。無意識に体の姿勢を制御している。
この揺らせることによって直立を維持するメカニズムの基本的なところは理論モデルとシミュレーションで示してきた。
理論モデルで示したように、直立構造の運動方程式は、単振り子の運動方程式とよく似ている。同じように見える。ただ、加速度の方向が逆向きになっていて、三角関数ではなく指数関数でそれが解けるようになっている。
下向きのたん振り子は、それ自体に、あるいは内生的に、復元力が働くのだが、逆さまの振り子であるロボットは(現在の多くのロボットは、NAOも含めて逆さ振り子とは言えない。新しい設計思想で作られるロボットのことを意味する)、それ自体は、転倒が基本なのだ。それに対する外生的な揺り戻しが生じることによって転倒を微妙に避けている。このような姿勢制御によって、直立が維持される。そのプロセスは、結局、揺れている状態と同じになるのだ。
この揺れは、この立っている状態に冗長性を生むというもう一つの、とても大事な側面を持っている。単なる剛体であれば、ちょっとした撹乱としての傾きで倒れてしまう。しかし、常に揺れながら状態を直して入れば、撹乱を吸収できるゆとりが出てくる。
スポーツでは、膝や腰や腕を柔軟に使うことが大切なこととして求められる。人間のさまざまなしなやかさは、関節の自由度の大きさによって確保されている。
そのようなロボットをイメージすることがとても大切だ。
日別: 2017年4月27日
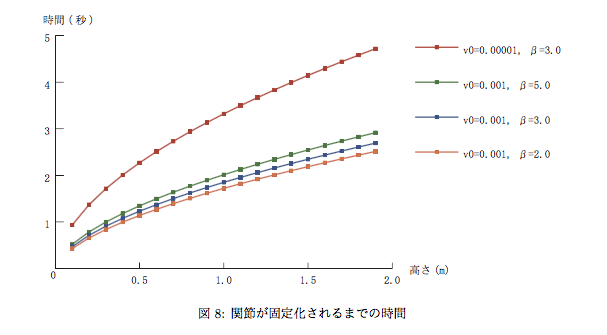
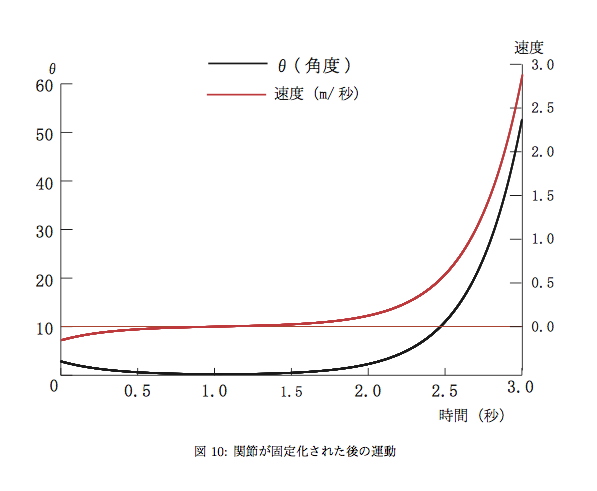
時間を入れたシミュレーション
ロボットの転倒とその回避に関わる分析で、これまでは明示的に時間が入らなかった。そこで、ロボットの転倒と回復に関する運動方程式を求めてシミュレーションしてみた。
結果の詳細は論文参照