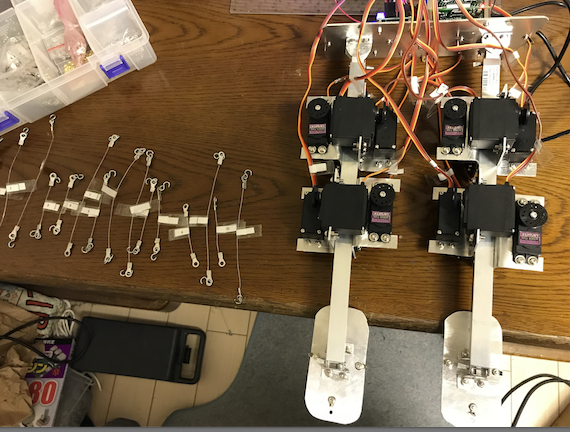
夕方からの時間のほとんどを使って、サーボから伸びるリード線を16本作成した。
サーボのゼロ位置の調整、そこから足と上板への距離を測って、それに見合うものを作成したが、おそらく全て調整し直す必要がある。1、2ミリ長くなるので、その分切って、半田付けで繋げるという作業が必要になると思う。
その調整が滑って終わったら、サーボの初期位置でこのロボットを立たせるつもりだ。サーボに支える力がなかったら、最初から全て考え直さなければならなくなる。そうならないことを願いたい。
16個のサーボを、うまく制御するためのプログラム上の工夫が必要だとは思っている。