シミュレーターで、先のAshiro1のCosmファイルに膝を曲げる動きだけを加えたものを食わせて見た。
明らかに不自然だ。実際のロボットだったら変なことになっただろう。
シミュレーターがもっと自然な動きになるように工夫する必要がある。次の図を見てもらいたい。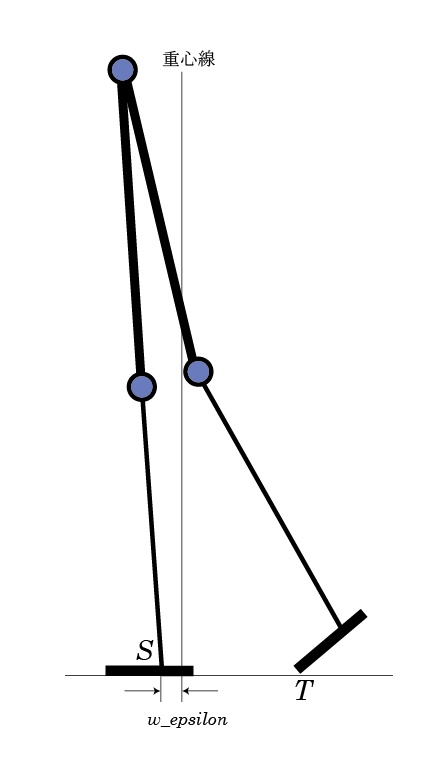
後ろになった足がかかとを曲げ高くすることによって膝が周り、体全体が前のめりになり、一体の状態まで来ると後ろ足が上がり、前足のみで立つようになる。
重心が支えている足の一定近くに来るまでは、後ろ足をあげられないようにすれば良い。
それまでは、T点とS点で支えるような形にするのである。
さらに、近傍の中に入って、反対側の足がつり上がっている状態においては、その足の足首の角度が体全体の傾きを規定する、とすれば良い。
また、この近傍の大きさは、体に働いている慣性力の影響を受ける。体が強く動いている時には、この近傍は大きくなるだろう。逆に、体がゆっくりとしか動いていないときは、相対的にこん近傍は小さくなる。