逆振り子中の加速度データが取れた。
加速度データは別スレッドで動かして取っているのだが、その間、なんだかサーボ制御の動きがおかしかった。RaspberryPiはコア4なのに、スレッド1個で動揺していては困るな。
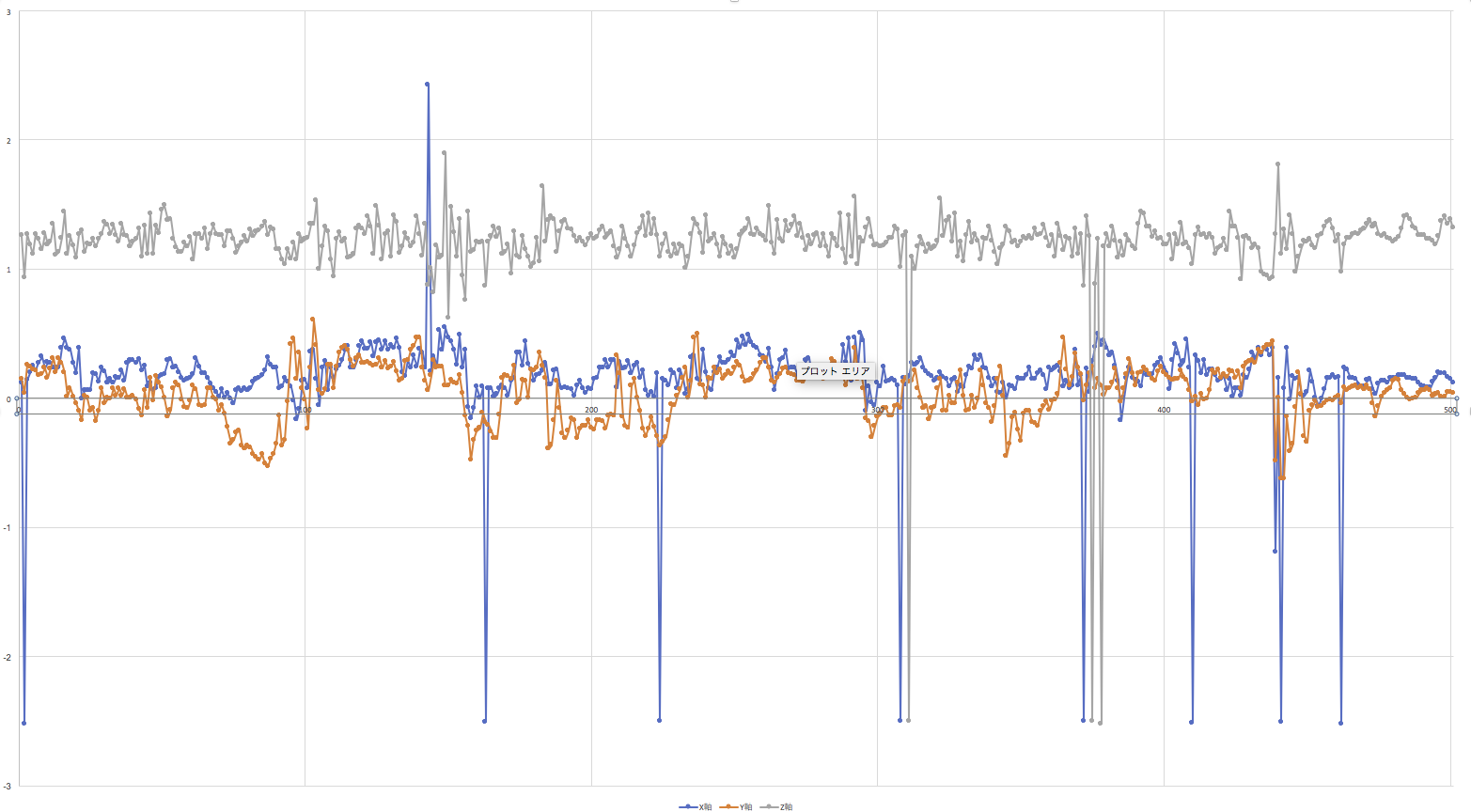 青のX軸が前後の動きで、オレンジのYが左右、灰色のZ軸が上下である。
青のX軸が前後の動きで、オレンジのYが左右、灰色のZ軸が上下である。
左右には割と安定して揺れているが、ぜん後には突然揺れが襲ってきている感じだ。
どういうタイミングで足を前後に出して行くかが問題だ。もう少し、一方の足への重心移動がはっきりと、安定して行われなければ、逆足の前への移動は難しいのかもしれない。