まだ、スレッド化はしていないのだが、センサーのspiによるシリアル通信がサーボを動かすi2cとバッティングしないかを見るために、ロボットが歩行中に、同じRaspberryPiから、センサープログラムも動かして影響を調べた。基本的に影響はない様だ。独立してデータを処理している。
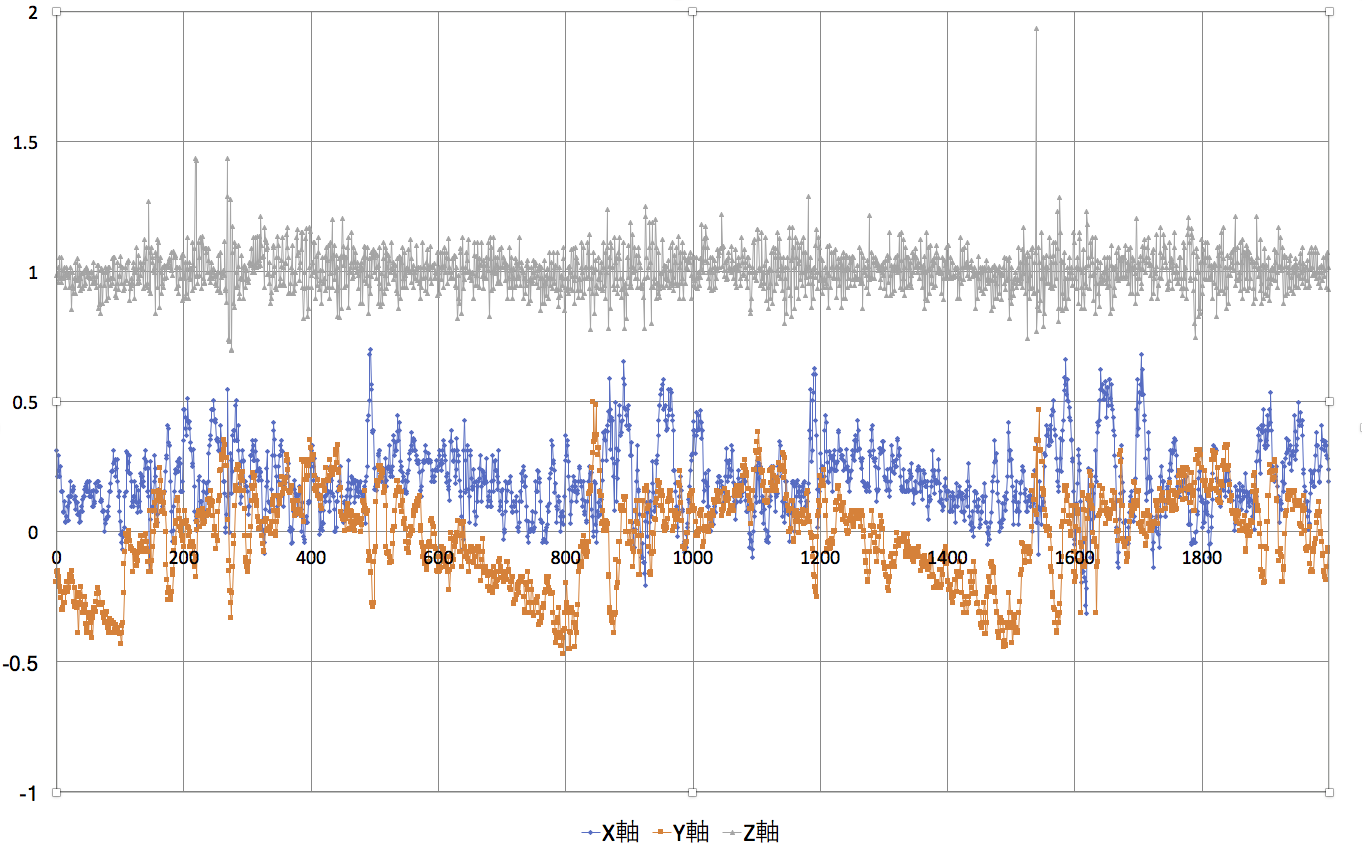
歩行中のセンサーデータを初めてとったことになる。歩行の様子は、前の記事にあるゆっくりとしたものだ。データは20秒間の動きを10ミリ秒間隔で2000個とった。片側3歩くらいずつ動いている。
横方向(Y軸)は、揺れることが必要なので、まあいいが、縦の動き、前後の動き、X軸の動きの不安定さは、歩行の不安定さに直結しているが、これもまた、ある程度までは必要。
実際に速さを増やして、不安定歩行をさせてデータを取らなければならない。