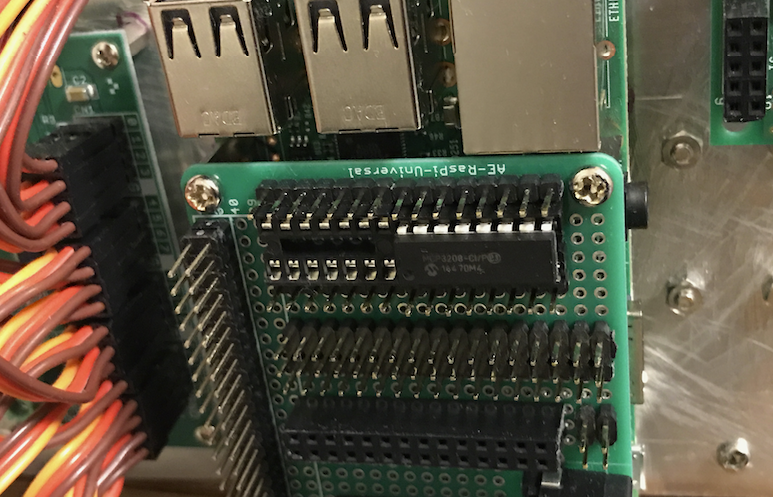
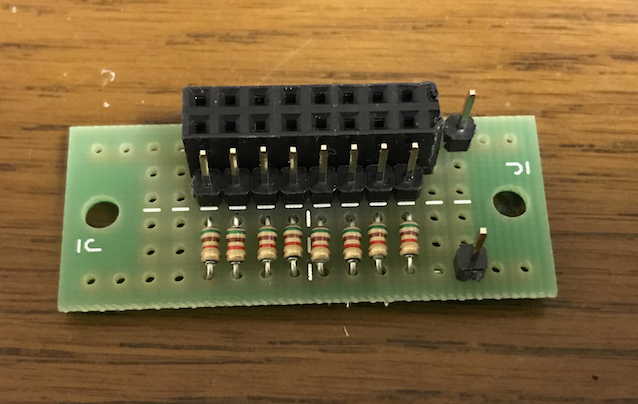
ロボットの足の裏に、片足四個ずつ、合計八個の圧力センサーをつけて、ロボットの実際の重心の状況をロボット自身が捉えられるようにしようと、センサーとADコンバーター中継する部品を製作し、コンバーターをRaspberryPiの基板上に置いた。データをSPIで撮ろうと思っているが、うまくいくだろうか。
加速度センサーも追加で四個つけるので、センサーだらけになるが、それらのセンサーは、人間側のプログラムが情報を処理するのではなく、ロボットのAIで処理するように思っている。だからこんなにセンサーをあちらこちらにつけるのだが。