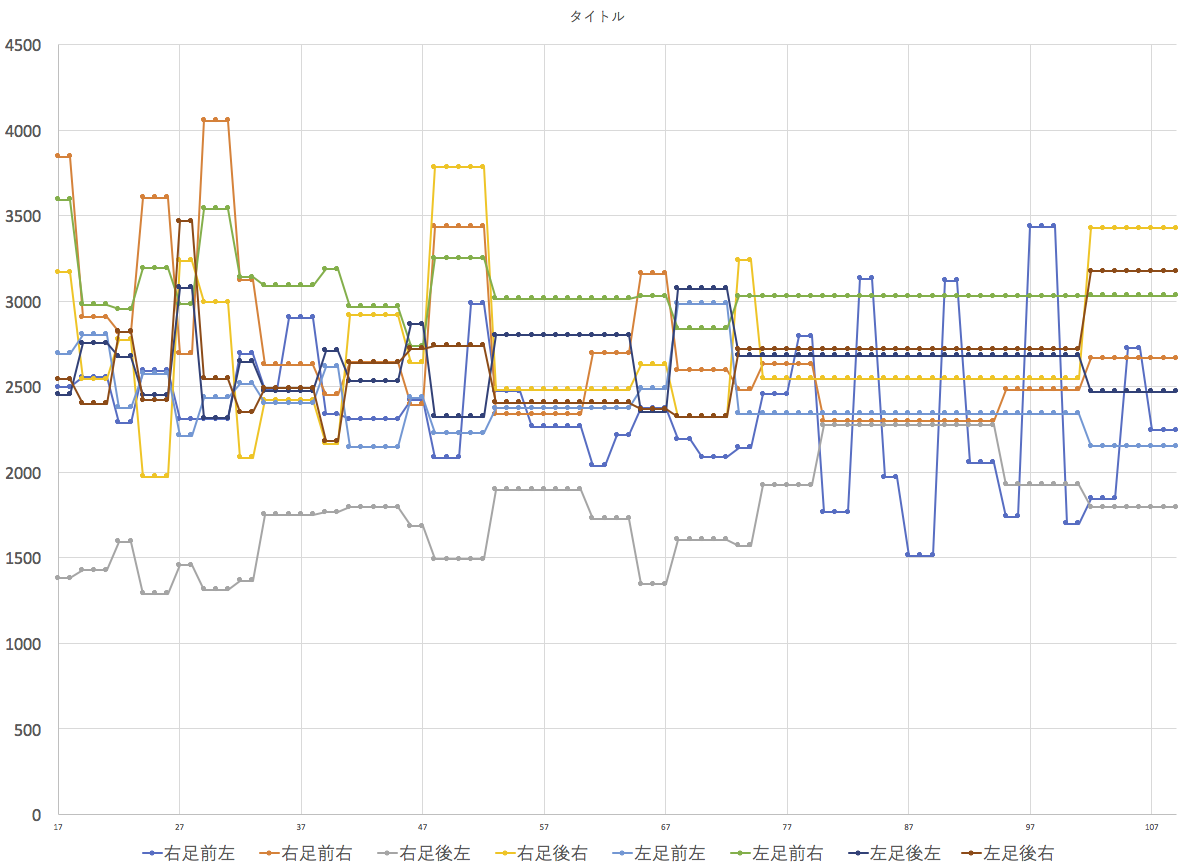
全てのセンサー(足裏に片足4個両足8個の圧力センサー、上版とスネ2個及び足2個の計5個の加速度センサー)をロボットに装着、2つのSpiチャンネルをフル稼働してデータが取れるようになった。
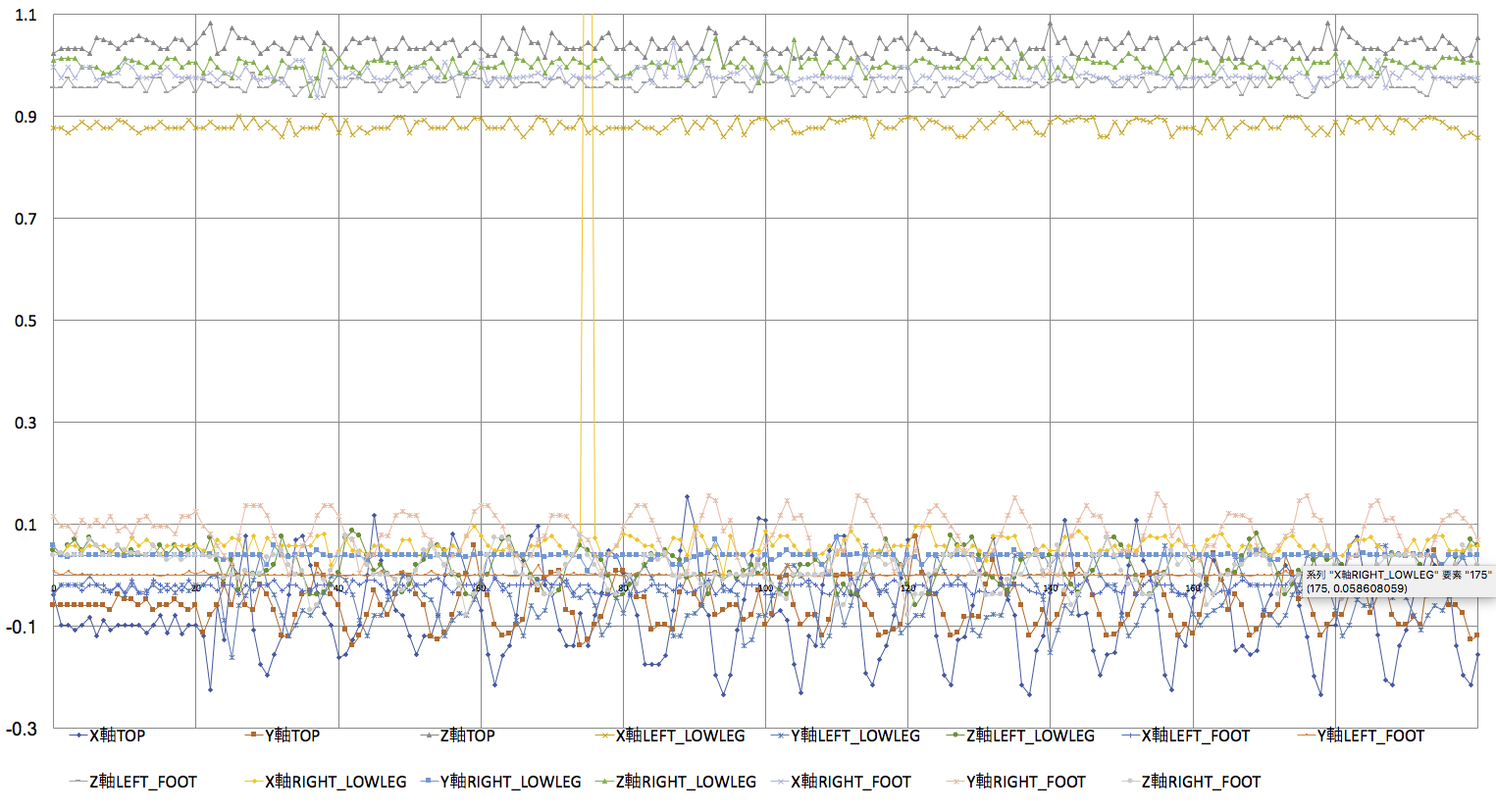 加速度センサの膝下に設置した2個は、X軸が縦になっているので1gのあたりでうろついている。異常値が1つあるが、電源がショートしたか飛んだのではないかと思っている。
加速度センサの膝下に設置した2個は、X軸が縦になっているので1gのあたりでうろついている。異常値が1つあるが、電源がショートしたか飛んだのではないかと思っている。
圧力センサーの不器用な動きがきになるが、ADコンバータの仕様ではないかと思っている。
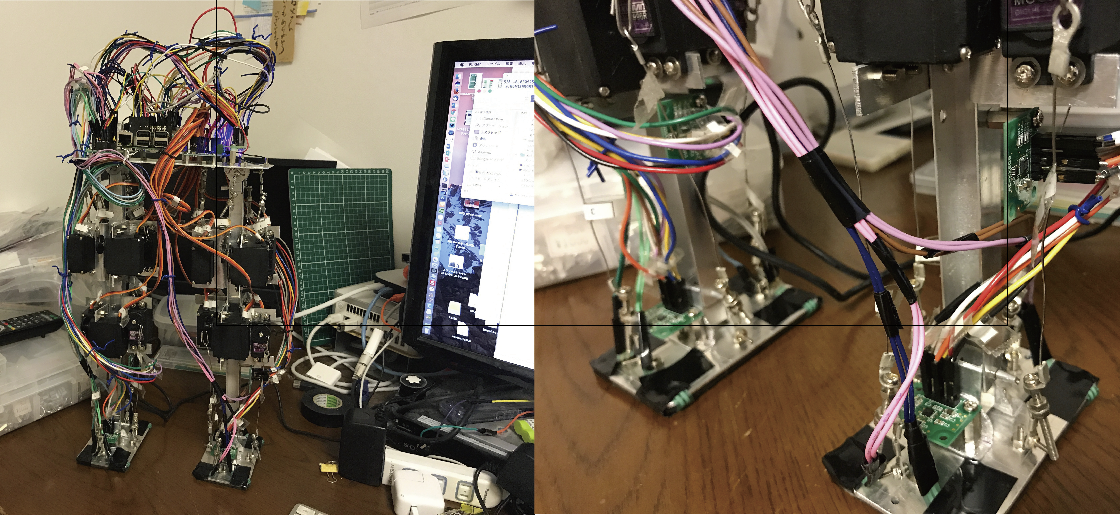
ロボットは、配線のお化けのようになった。
 次は、これらのセンサーとサーボモーター群をロボットの脳である、ニューラルネットワークシステムにつなげる。
次は、これらのセンサーとサーボモーター群をロボットの脳である、ニューラルネットワークシステムにつなげる。