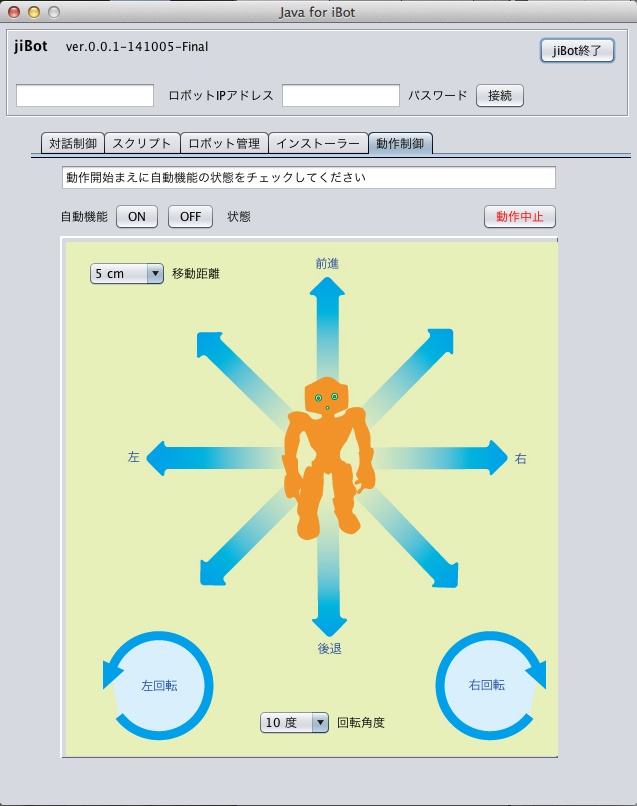
java用のqimessaging.jarを使って、対話管理(スクリプトの開始や表示)、動作制御(5cm〜90cmの移動、10度〜180度の回転)、状態把握(バッテリ、ディスク、メモリ、休息、起床、停止、再起動など)、ibotのインストール(モジュールのロボットへの組込み)などをこなす、jiBotのチェックが終わった。
※ このjiBotは、Pepperにたいしても使えるはずである。使用しているすべてのAPIがNAOとPepperとの共用のものだから。
予定通り稼働した。先にビデオで示した、口頭による動作プログラム(長い距離:0.5m〜10m程度まで移動制御できる)とあわせれば、ほぼ、指定場所に、リモートでロボットをセットでき、対話の制御、また、ibotクラウドにつながらなくても、ibotモジュールの制御ができるようになった。
※ クリックすると原寸表示
(ロボットを含むローカルネットへの接続は必須:macとlinuxでは問題なく動く。Windowsについては、32ビットバージョンで稼働する。)