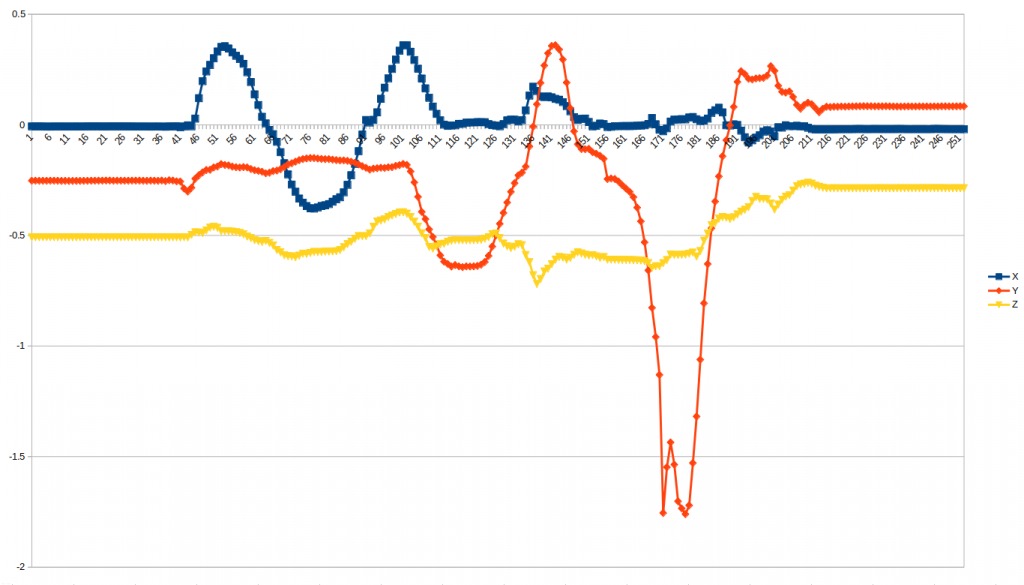
NAOの胴体角度を100msec単位で取得した。図は、NAOを前後左右に揺らした結果である。縦軸は角度で、単位はラジアンである。
次の3個のキーがあって、メモリイベントとして取得すれば、胴体の絶対角度を取得できる。
Device/SubDeviceList/InertialSensor/AngleX/Sensor/Value Device/SubDeviceList/InertialSensor/AngleY/Sensor/Value Device/SubDeviceList/InertialSensor/AngleZ/Sensor/Value
私が自分で作ったロボットの場合は、地磁気センサーを使って取得したが、NAOは、加速度センサーと角速度センサーから計算しているようだ。
上記の図で、前後の傾きがオレンジである。少しゼロから外れているのは、最初から少し傾いていたということだ。後半に極端な負になっているのは、誤って後側にNAOを倒してしまったからである。Zは、垂直軸の回転で、これは前後左右の傾きのように、直感的なゼロ度が不明である。地磁気の北かと思ったが、そうでもないようだ。地磁気センサーはないのだろう。しかし、縦軸の回転のゼロ度は大きな問題ではない。初期の向きをゼロ度にしておけば良いからだ。
これから、キレキレの踊りをさせるプロジェクトを始めるが、絶対角度は何かに使えるし、使わなくてはならないだろう。