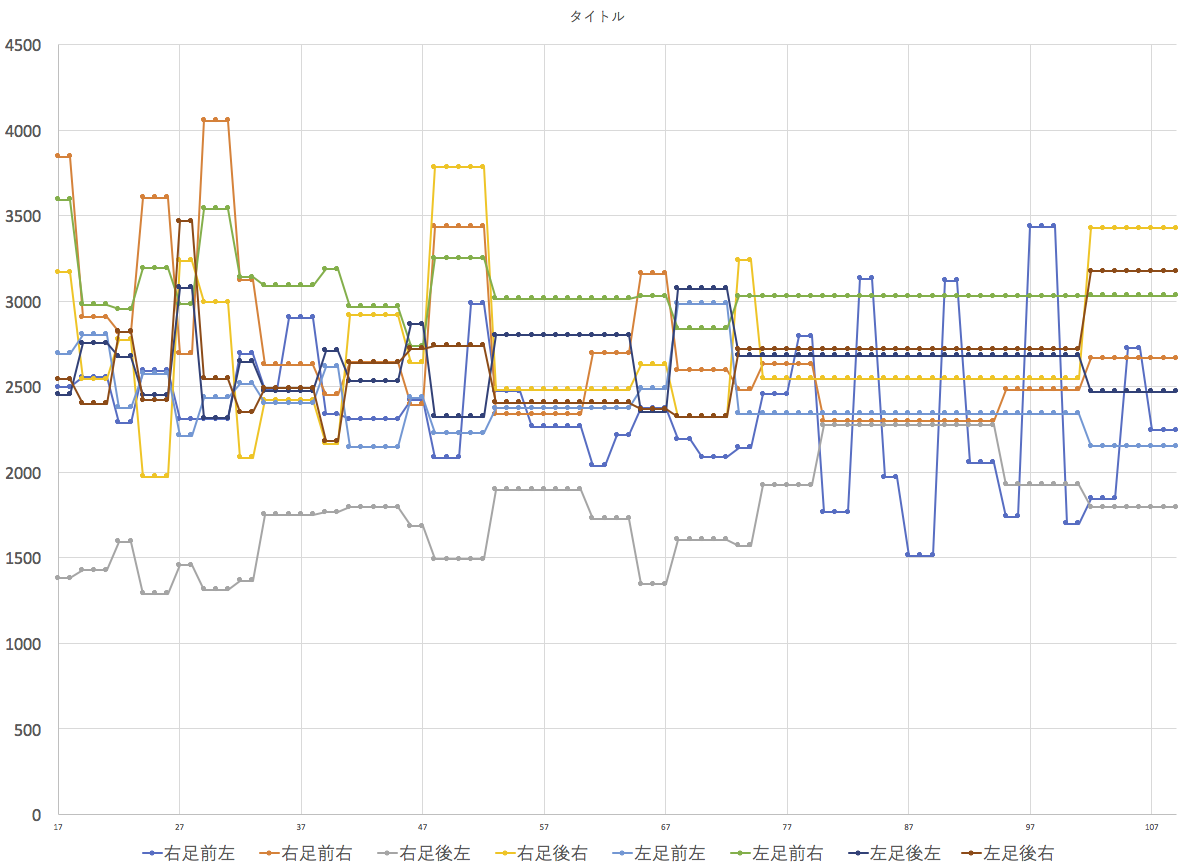
全てのセンサー(足裏に片足4個両足8個の圧力センサー、上版とスネ2個及び足2個の計5個の加速度センサー)をロボットに装着、2つのSpiチャンネルをフル稼働してデータが取れるようになった。
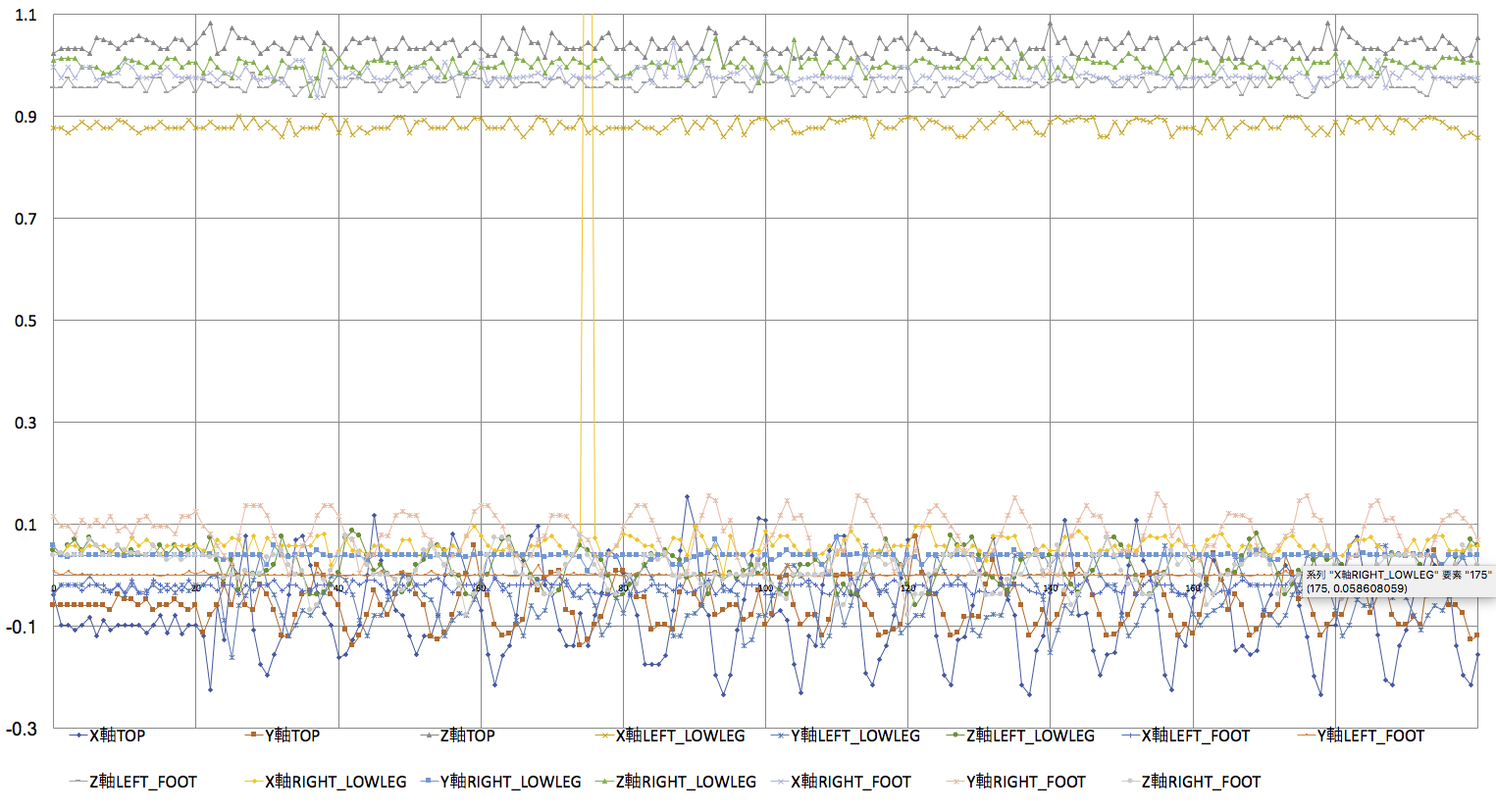 加速度センサの膝下に設置した2個は、X軸が縦になっているので1gのあたりでうろついている。異常値が1つあるが、電源がショートしたか飛んだのではないかと思っている。
加速度センサの膝下に設置した2個は、X軸が縦になっているので1gのあたりでうろついている。異常値が1つあるが、電源がショートしたか飛んだのではないかと思っている。
圧力センサーの不器用な動きがきになるが、ADコンバータの仕様ではないかと思っている。
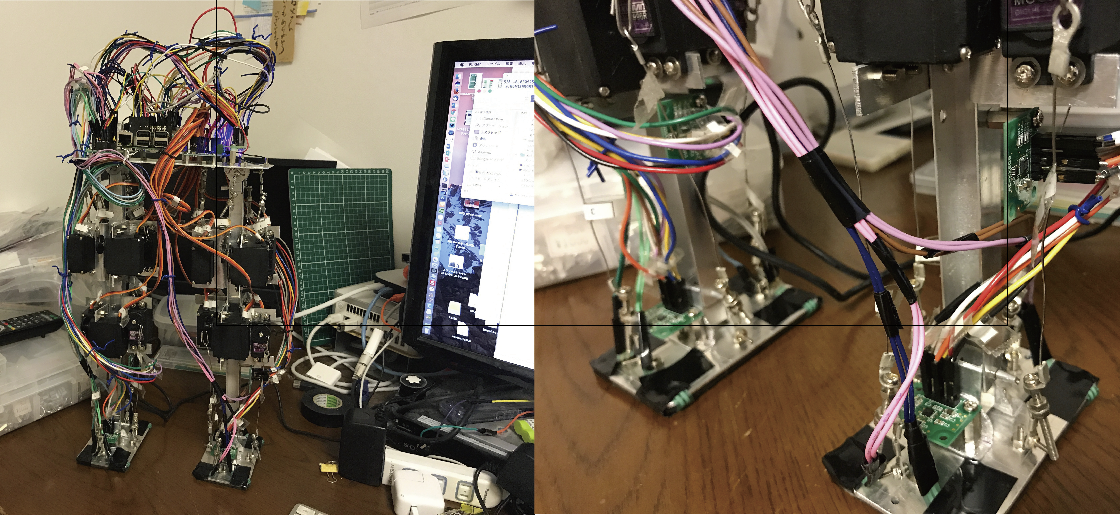
ロボットは、配線のお化けのようになった。
 次は、これらのセンサーとサーボモーター群をロボットの脳である、ニューラルネットワークシステムにつなげる。
次は、これらのセンサーとサーボモーター群をロボットの脳である、ニューラルネットワークシステムにつなげる。
日別: 2017年6月24日
研究会の刷新
この研究会ページを大幅に更新した。
何よりも研究会の名前を上智大学ロボット研究会から単にiBot研究会に変更した。
3年前(2014年7月5日)にこのサイトを開いたときは、本当に、上智大学を代表するような研究会にしたいと思った。大学の中で、学生も含めたくさんのロボットを研究したいと思う人たちと一緒に研究を深めたいと思った。大学の中で仲間も募った。呼びかけた。ほとんど反応がなかった。
結局、私自身が、誰が見ているかいないかに関わらず、自己確認のために、あるいは忘却防止のために書き続けるサイトになった。自分としては、すごいことを書き続けている気はするのだが、さっぱり反応はない。しかし、これは階段を自分で作りながら登る作業なので、その階段を確認するためのページとしては十分すぎるほど役立っている。
私から見れば、過去の記事は古い記事で、ほとんど新鮮味がないので、新しい状況に応じた、細かい訂正もしていない。それを理解して過去の記事は見て欲しい。
人もいないしお金もないので、ちゃちなことをやっているように見えるかもしれないが、自分としては、誰もやったことのない場所を歩いている気持ちだ。